Bachelorarbeit von Fabian Claus
Inbetriebnahme des OpenMANIPULATOR-X und Handlungsplanung mit Partial Order Planning Forward
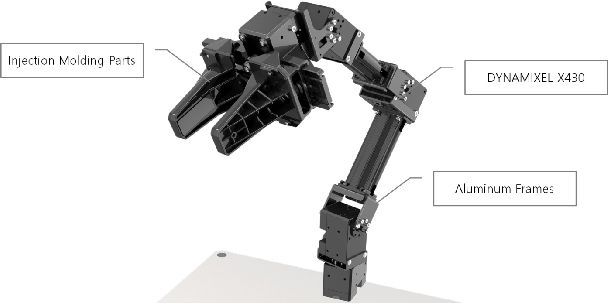
Im Rahmen dieser Bachelorarbeit wird der Greifarm OpenManipulator-X der Firma ROBOTIS in Betrieb genommen. Der OpenMANIPULATOR-X ist ein Greifarm der Firma ROBOTIS, der mit dem Robot Operating System 2 (ROS2) betrieben wird. Für diese Arbeit wird er auf einer stationären Basisplatte montiert. Alternativ besteht die Möglichkeit ihn auf dem mobilen Roboter TurtleBot3 WafflePi zu montieren.
Es werden ein Überblick über die grundsätzlichen Vorgänge und Prozesse bei dessen Nutzung gegeben sowie die Möglichkeiten der Steuerung erprobt. Weiterhin wird die Steuerung mittels Handlungsplanung ermöglicht. Hierzu ist der Stand der Forschung auf dem Gebiet der automatischen Handlungsplanung dargestellt. Als geeignetes Planungsverfahren wird "Partial Order Planning Forward" implementiert und einem selbstgewählten Szenario (Blöckewelt) praktisch demonstriert.

mit dem OpenManipulator-X und ROS 2
Kolloqium: 24.02.2022
Betreuer: Prof. Dr.-Ing. Jochen Heinsohn, Dipl.-Inform. Ingo Boersch
Download: A1-Poster, Abschlussarbeit