GPT als Mensch-Roboter-Schnittstelle
GPT als Schnittstelle zwischen Menschen und Robotern am Beispiel eines rudimentären Bringe-Roboters im Szenario der Pflege
Im Rahmen des Masterprojektes "Künstliche Intelligenz - ChatGPT in Action" im WS23/24 wurde ein Prototyp einer Robotersteuerung entwickelt. Ziel des Projektes ist die Entwicklung und Evaluierung eines Systems zur Steuerung eines Pflegeroboters durch Kommunikation mit einem Large Language Model (LLM) am Beispiel eines rudimentären Bringeroboters. Es geht um die Untersuchung der Eignung des LLM als Schnittstelle zwischen einem Roboter und einer körperlich eingeschränkten Person, um einfache Aufgaben in der Sichtweite und unter Kontrolle des Nutzers zu übernehmen.
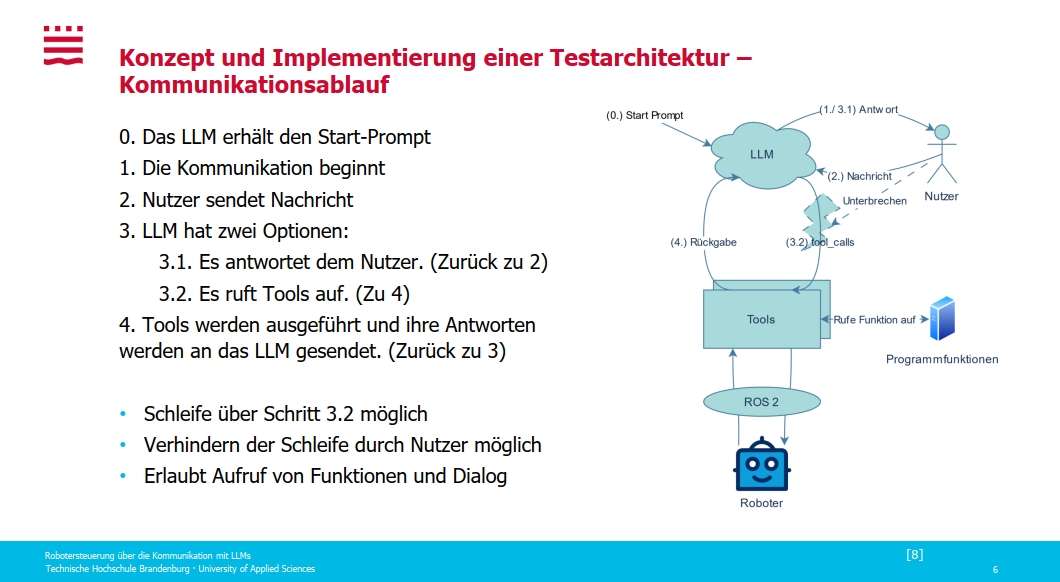
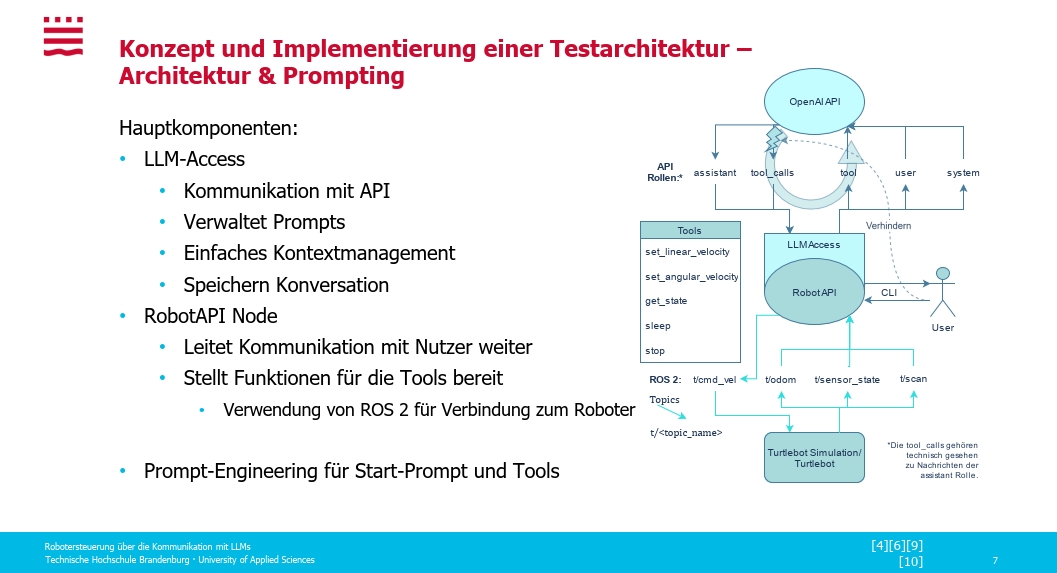
Die Methode zur Entwicklung des Systems umfasst den Entwurf und die Implementierung einer Testarchitektur, die aus zwei Hauptkomponenten besteht: LLM-Access zur Verwaltung der Kommunikation und RobotAPI Node zur Schnittstelle mit dem Roboter. Die Architektur basiert auf der Verwendung von ROS 2 Humble und beinhaltet ein effizientes Kontextmanagement und die Speicherung von Konversationen. Der Kommunikationsfluss beginnt mit dem Startprompt des LLM und kann iterativ zwischen Benutzeranfragen und Funktionsergebnissen wechseln.
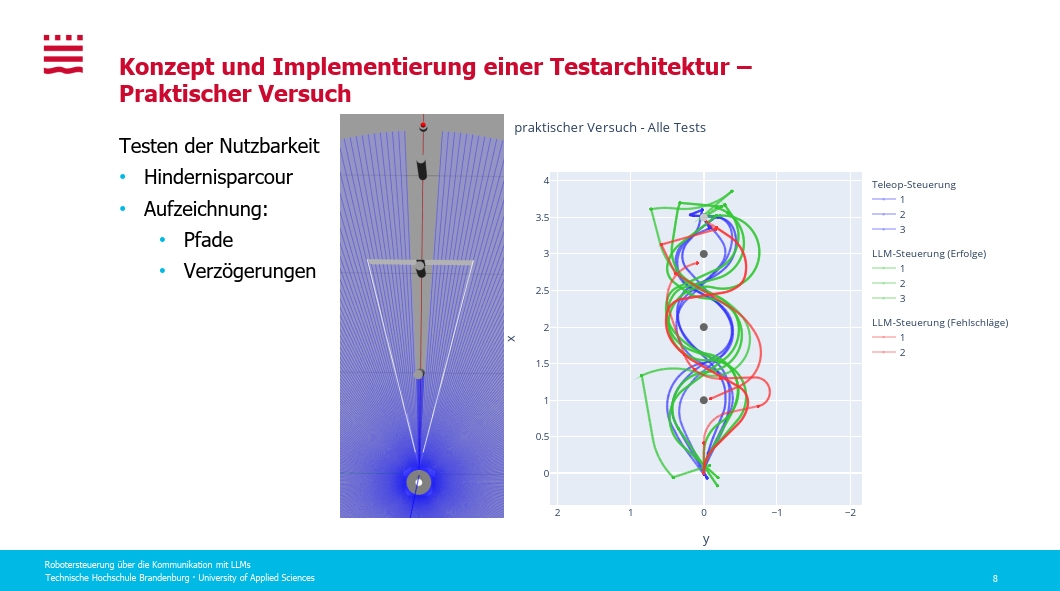
In Praxistests wurde die Benutzbarkeit des Systems anhand eines Hindernisparcours getestet, bei dem ein simulierter turtlebot mit Laserscanner in einem slalom durch Sprachkommandos geführt wurde. Die Wege und Verzögerungen wurden aufgezeichnet.
Die Ergebnisse der Tests zeigen, dass GPT-3.5 als Schnittstelle für die Steuerung von Robotern nur bedingt geeignet ist. Positiv hervorzuheben sind die flexible Verwendung von Funktionsaufrufen und die Fähigkeit, komplexes Verhalten zu erklären. Negativ sind jedoch die hohen Verzögerungen und Missverständnisse. Die Auswertung der Praxistests ergab eine durchschnittliche Reaktionszeit von 2,3 bis 2,4 Sekunden mit Schwankungen zwischen den Durchläufen. Zur Verbesserung des Systems wird die Verwendung von Modellen mit geringerer Verzögerung und sicherheitsrelevanten Sperren empfohlen. Insgesamt zeigt das Projekt das Potenzial und die Grenzen von LLMs als Schnittstelle für die Robotersteuerung im Pflegebereich auf.
Vortrag: 08.02.2024
Betreuer: Dipl.-Inform. Ingo Boersch