Pizzabote 2024 - Breitensuche praktisch
Pizzabote 2024 - Breitensuche praktisch
In diesem Bachelorprojekt geht es um die Konstruktion und Programmierung eines Roboters, der Pizzas einzeln an Kunden ausliefert. Die Welt ist formalisiert, nicht wirklich essbar und dennoch real und physisch:
"Ihr Roboter erhält den Auftrag, eine oder mehrere Pizzen auszuliefern. Das Streckennetz ist ein einfaches Gitter, in dem es jedoch zu Störungen und damit zu unpassierbaren Kreuzungen kommen kann. Die gute Nachricht ist, dass Sie über globales Wissen verfügen und die aktuelle Karte der befahrbaren Wege dem Roboter kurz vor dem Start zur Verfügung gestellt wird."
Das ist auf einem Mikrocontroller in C mit einer Breitensuche möglich, wenn man sie denn implementieren kann, alle Sonderfälle berücksichtigt und mit 7000 Byte(!) Speicher ohne Heap auskommt. Der Aktionsplan muss dann "nur" noch ausgeführt werden. Das Acoustic Vehicle Alerting System (AVAS) darf natürlich nicht fehlen.
Die Aufgabe wurde in diesem Projekt von den 4 Teams hervorragend gelöst. Bei vier Runden und drei Lieferadressen sind theoretisch 124 Punkte für ein Team möglich, wenn alle Lieferungen funktionieren und kein anderer Roboter die Adresse zuerst beliefert, wie z.B. im Finale. Die Punktetabelle zeigt, wie nahe die Teams der optimalen Punktzahl gekommen sind.
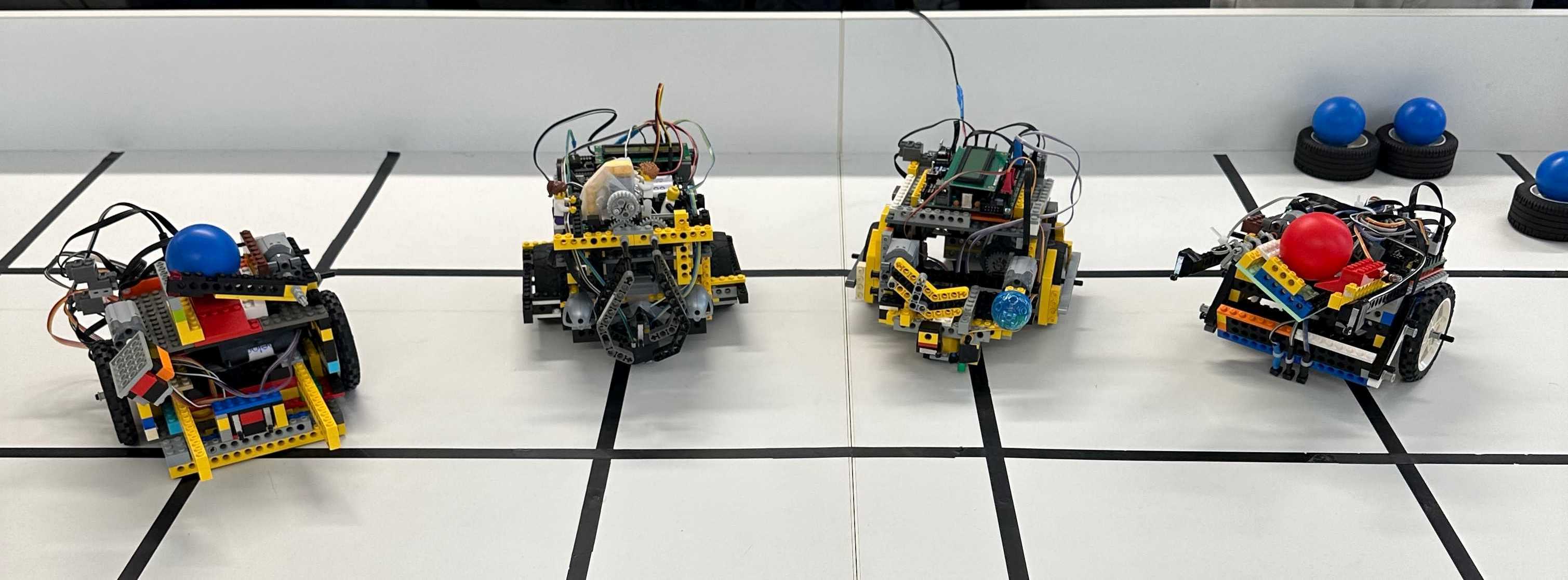
Die Roboter


Wettbewerb am 17. Januar 2024
Es traten 5 Roboter zum Wettbewerb an: PizzaPronto, Form Follows Function, Name1 und driveReal(Fast).
Nach erfolgreichen Einzeldemonstrationen und den ersten drei Runden qualifizierten sich Form Follows Function und PizzaPronto punktgleich für das Finale. Im Finale waren insgesamt drei Pizzen zu liefern, wobei die entscheidende Frage war, wer die dritte Pizza liefern kann. PizzaPronto war durch eine strategisch bessere Wegplanung (siehe Video) in der Lage abzukürzen, die Pizza schneller als der gleich schnelle Gegener zu liefern und zu verteidigen.
Betreuer: Prof. Dr. Emanuel Kitzelmann, Dipl.-Inform. Ingo Boersch