Bachelorarbeit von Veit Kilian Siebert
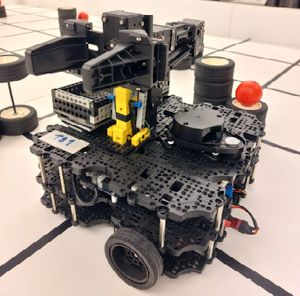
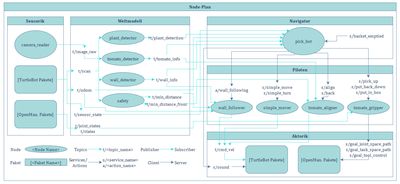
Entwicklung eines Demonstrators im Szenario eines mobilen Pflückroboters auf Basis eines TurtleBots und OpenMANIPULATORs
Diese Arbeit befasst sich mit der Entwicklung eines Demonstrators für einen mobilen Pflückroboter im Rahmen der Einführung von ROS 2 im Labor für Künstliche Intelligenz.
Hierzu gehören der Hardwareaufbau und insbesondere die Konzeption, Umsetzung und Evaluation einer geeigneten Software-Architektur in ROS 2. Die besondere Schwierigkeit der Arbeit besteht in der notwendigen Erschließung von Anwendungswissen zu ROS 2 und der Lösung vielfältiger Probleme realer Robotik. Das Szenario ist sinnvoll und ausreichend komplex zu definieren und mit seinen Rahmenbedingungen zu beschreiben. Die erstellte Applikation soll geeignet evaluiert und vollständig zur Weiterentwicklung und Inbetriebnahme dokumentiert werden.

Kolloqium: 06.10.2022
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr.-Ing. Jochen Heinsohn
Download: A1-Poster