Diplomarbeit von Jörg Dressler
Donnerstag, September 27, 2001
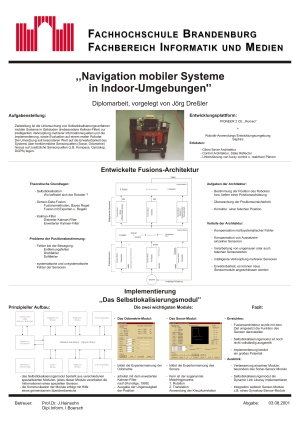
Navigation mobiler Systeme in Indoor-Umgebungen
Zielstellung des Themas ist die Untersuchung von Selbstlokalisierungsverfahren mobiler Systeme in Gebäuden (insbesondere Kalman-Filter) zur intelligenten Verknüpfung mehrerer Informationsquellen und die Implementierung, sowie Evaluation auf einem realen Roboter. Die Umsetzung soll besonderen Wert auf die Erweiterbarkeit des Systems über die herkömmlichen Sensorquellen (Sonar, Odometrie) hinaus auf zusätzliche Sensorquellen (z.B. Kompass, Gyroskop, DGPS) legen.
Abgabe: 03.08.2001 Kolloqium: 27.09.2001
Betreuer: Prof. Dr.-Ing. Jochen Heinsohn, Dipl.-Inform Ingo Boersch
Downloads: Diplomarbeit A1-Poster