Pioneer2 und Pioneer3-Roboter
Bei dem Pioneer 2/3 handelt es sich um eine neue Generation
intelligenter mobiler Roboter, die von der US-Firma MobileRobots
(ehemals ActivMedia) produziert werden. Bereits das Vorgängersystem
Pioneer 1 hat sich international bewährt und wird auch an vielen
deutschen Hochschulen in Lehre und Forschung eingesetzt (u.a. Uni
Freiburg, TU München, FH + Uni Hamburg, etc.).
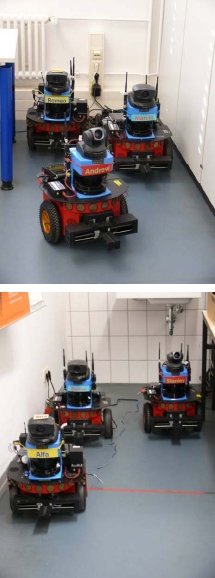
An der FH Brandenburg wurden
- 1999 2 x Pioneer II CE im Rahmen eines Forschungsprojekts (Alfa und Romeo)
- 2003 2 x Pioneer 3-DX/2-DX8 und (Marvin und Sunny)
- 2008 2 x Pioneer 3-DX (Stanley und Andrew)
beschafft. 2008 wurden die Roboter mit Laserscannern, onboard-PCs, WLAN und 5.8 GHz Video aufgerüstet. Die Roboter werden im Hauptstudium in der Veranstaltung "Autonome Mobile Systeme", sowie in Projekten und Abschlussarbeiten eingesetzt.
Die aktuelle Konfiguration beinhaltet:
- Asus Eee PC 1000H, 1.6GHz, 160GB HDD, 2GB RAM, Win7
- EVI-D31-Kamera bzw. EVI-D100P (Pan, Tilt und Zoom)
- DFG/USB2-lt Framegrabber
- 8 Sonarsensoren vorn
- Odometriesensorik
- elektronischer Kompaß V2X (nur P2)
- Elektromechanischer Greife
- Laser Scanner Sick LMS 200
- diverse Funkverbindungen
- ARIA (MobileEyes, MobileSim, ARIA-Entwicklungssystem und Klassenbibliotheken)
- Video-Empfänger
- Dokumentation, Visual Studio, OpenCV, …