Masterprojekt von Arne Allwardt
Masterprojekt von Arne Allwardt: Autonomer Lagerroboter mit ROS2 und Manipulator
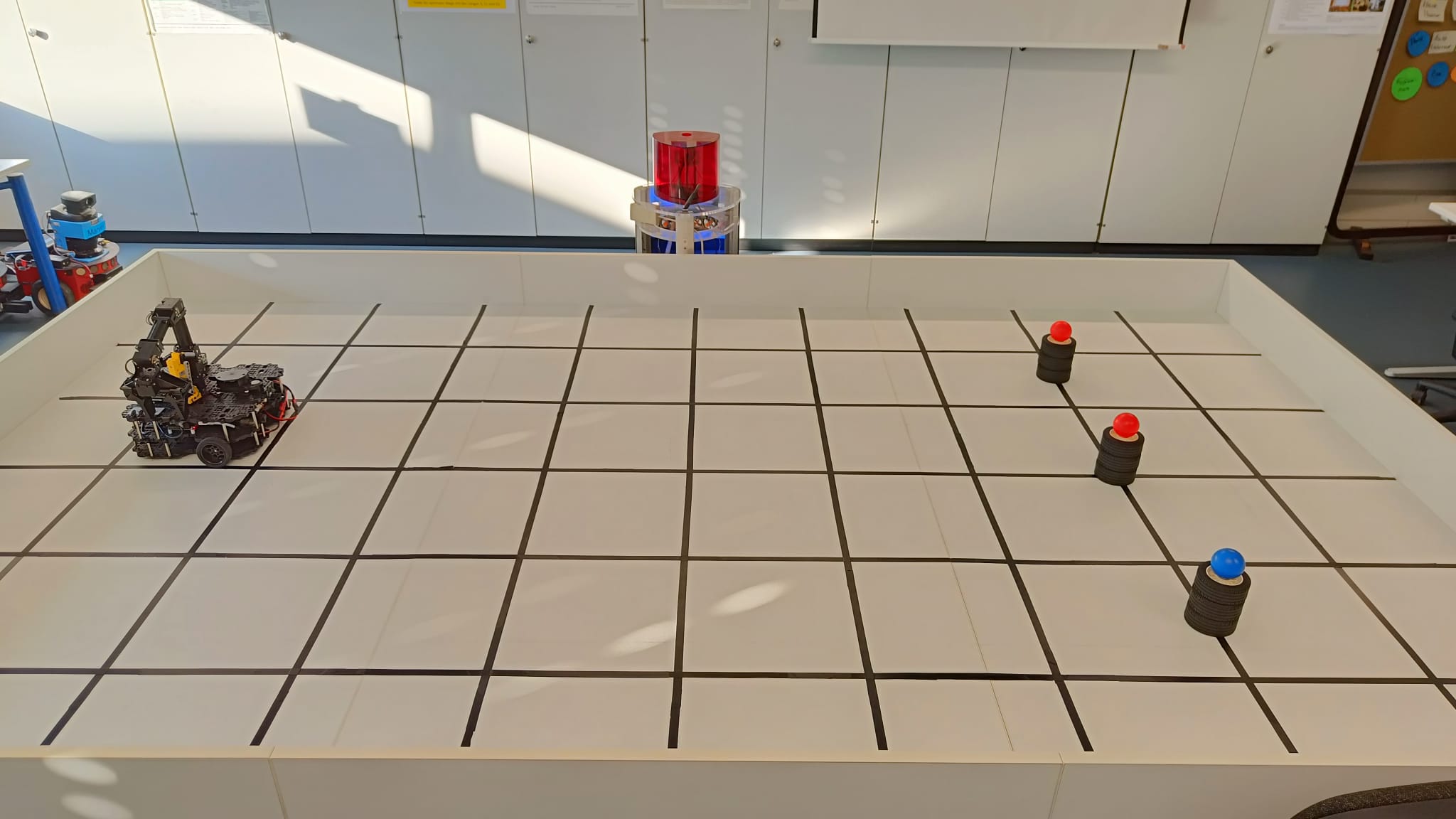
Im Rahmen seines Masterprojekts im WS24/25 entwickelte Arne Allwardt einen autonomen mobilen Roboter auf Basis des TurtleBot3 mit einem OpenManipulator-X-Arm. Ziel des Projekts war es, einen Prototypen zu realisieren, der selbstständig bestimmte Objekte an definierten Lagerplätzen aufsucht, greift und zurückbringt.
Der Roboter kartiert mit Hilfe der SLAM Toolbox seine Umgebung, lokalisiert sich über AMCL (Adaptive Monte Carlo Localization) und steuert mit Nav2 gezielt Positionen an, an denen blaue oder rote Bälle liegen. Mit Hilfe von OpenCV erkennt das System die blauen Bälle und nutzt den Manipulator, um sie zu greifen. Rote Bälle werden ignoriert.
Der Pfad zum Ziel wird über die navigate_to_pose-Action
generiert, wobei Costmaps aus Laserdaten entstehen. Für die
Interaktion von Bewegung, Wahrnehmung und Greifoperationen wurde ein MultiThreadedExecutor
verwendet. Die Steuerung basiert auf einem Zustandsautomaten, der
mit der Python-Bibliothek transitions umgesetzt wurde.
Für die Objekterkennung wurde eine Hue-basierte Farberkennung mit Erosion eingesetzt. Die größte erkannte Kontur wird als Ziel angenommen. Der Greifvorgang erfolgt blind, basierend auf Segmentierung und Kameraanalyse.


Die Navigations- und Greifvorgänge wurden in umfangreichen Szenarien getestet. Die Robustheit hängt von Faktoren wie Startposition und Beleuchtung ab – die automatische Lokalisierung konnte aber viele Störungen kompensieren. Das Video zeigt einen typischen Durchlauf.