Willkommen im KI-Labor
Lehre und Forschung auf den Gebieten
-
Wissensverarbeitung und Methoden der Künstlichen Intelligenz:
Neuronale
Netze, Bayessche Netze, Ontologien und Wissensgraphen, Evolutionäre
Algorithmen, Induktive Logische Programmierung
-
Data Science, Maschinelles Lernen, Deep Learning
-
Intelligente Roboter
AI Prototyping Lab mit Projekten zu
-
Deep Learning, Large Language Models und Wissensgraphen
-
EDGE AI und Computer Vision
-
KI-Planung und Wissensverarbeitung
-
Intelligente Roboter
Studienrichtung
"Künstliche Intelligenz" im Informatikstudium
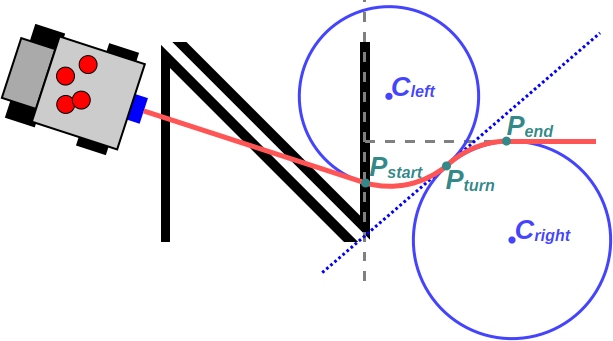
Manöverbeispiel der autonomen Schubkarre anhand
einer Z-Marke
Autonome Intelligente Roboter – KI-Projekt im Wintersemester
2025/26
Im Projekt Autonome Intelligente Roboter entwickeln
Studierende in kleinen Teams kreative Robotik- und KI-Anwendungen.
Ziel ist die Realisierung autonom handelnder Demonstratoren, die
intelligente Funktionen wie Wahrnehmung, Sprachverarbeitung,
Planung, Lernen oder Interaktion mit Menschen kombinieren.
Projektübersicht
Das Smart Dungeons and Dragons Dice System erkennt
Dungeons-&-Dragons-Würfel mit selbsttrainierten KI-Modellen und
reagiert auf Wurfergebnisse mit Licht, Sound, Text und Bildern.
Eine HTML-Anwendung, YOLOv8-Modelle und ein ESP32 mit WLED-Streifen
bilden zusammen einen interaktiven Demonstrator. (Hannah
Mierzchala)
Starseeker ist ein...
mehr lesen ...
Mittwoch, Februar 25, 2026
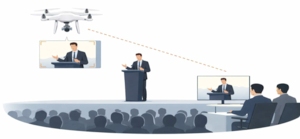
Autonomes Personenfolgesystem mit einer Drohne
(Q. T. A. Nguyen, Y. C. Camacaro Querales)
DrohnenLab – Intelligente Flugsysteme im Wintersemester
2025/26
Im KI-Projekt des 5. Semesters im Wintersemester 2025/26
entwickelten Studierende im DrohnenLab intelligente
Flugdemonstratoren auf Basis der Ryze Tello-Plattform. Ziel
war die Umsetzung autonomer oder teilautonomer Flugverhalten durch
die Kombination von Echtzeit-Bildverarbeitung, Flugsteuerung und
externer Entscheidungslogik.
Die Aufgabenstellung umfasste die Entwicklung innovativer
Anwendungsszenarien unter Nutzung der integrierten
Kamerasysteme sowie Python-basierter Steuerungsbibliotheken – von
bildverarbeitungsbasierter Objektverfolgung bis hin zu
automatisierten Navigations- und Interaktionsmechanismen.
3 Anforderungen
- Autonomes oder teilautonomes Flugverhalten...
mehr lesen ...
Donnerstag, Februar 19, 2026
Untersuchung des Potentials von Netzwerkverkehrsanalysemethoden
zur automatischen Inventarisierung von Systemen in
Krankenhäusern
Die Masterarbeit untersucht, inwieweit eine passive
paketbasierte Netzwerkverkehrsanalyse zur automatischen
Klassifikation von Geräten in medizinischen IT-Infrastrukturen
eingesetzt werden kann. Ziel ist die Unterstützung eines
automatisierten Netzwerkinventars, das insbesondere im
Krankenhausumfeld eine zentrale Rolle für IT-Sicherheit und
Systemübersicht spielt.
Ausgangslage: Trotz der hohen Bedeutung aktueller
Netzwerkinventare mangelt es an öffentlich verfügbarer Forschung
zur automatisierten Geräteerkennung im Gesundheitswesen. In der
Arbeit wird daher ein Proof of Concept zur Geräteklassifikation in
medizinischen Netzwerken durch Reproduktion einer bestehenden
Forschungsarbeit implementiert und evaluiert....
mehr lesen ...
Montag, November 03, 2025
Optimierung der Rechnungsextraktion durch Einsatz von Large
Language Models: Ansätze und Evaluation bei der aifinyo AG
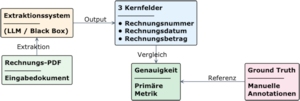
Die Masterarbeit untersucht die Leistungsfähigkeit von Large
Language Models (LLMs) zur Extraktion strukturierter Rechnungsdaten
aus PDF-Dokumenten. Der praktische Einsatzkontext ist die Berliner
FinTech-Firma aifinyo AG, die monatlich rund 15.000 Rechnungen
verarbeitet und eine robuste automatisierte Erfassung von
Rechnungsnummer, -datum und -betrag benötigt.
Ausgangslage: Die bestehende OCR-Lösung (Gini) zeigt
Schwächen bei variablen Rechnungslayouts. Die Arbeit prüft, ob
LLM-basierte Verfahren eine signifikant robustere Alternative
darstellen können.
mehr lesen ...
Vergleich von Methoden zur Echtzeit-Hinderniserkennung in
Forward-Looking-Sonardaten für die Kollisionsvermeidung
Kameras sind unter Wasser nur eingeschränkt für die
Hinderniserkennung einsetzbar. Die Bachelorarbeit erkundet daher
die Verwendung eines Forward-Looking-Sonars (FLS) auf dem „
Sonobot-5“ der Firma EvoLogics. Verglichen werden zwei klassische,
ein probabilistischer und ein Deep-Learning-basierter Ansatz mit
dem Ziel, eine echtzeitfähige Hinderniserkennung zur
Kollisionsvermeidung zu ermöglichen.
Forward-Looking Sonar (FLS): Ein FLS sendet Schallimpulse
kegelförmig nach vorne aus; reflektierte Echos werden empfangen
und als zweidimensionale Abbildung der Umgebung (Strahlenwinkel,
Entfernung) dargestellt.
mehr lesen ...
Mittwoch, Oktober 01, 2025
Neue Professorin für Künstliche Intelligenz am Fachbereich
Informatik und Medien der TH Brandenburg
Der Fachbereich Informatik und Medien der Technischen Hochschule
Brandenburg freut sich, Frau Prof. Dr.-Ing. Darya Kastsian
zum 1. September als neue Professorin für Künstliche
Intelligenz begrüßen zu dürfen.
Frau Prof. Kastsian bringt langjährige Erfahrung aus Forschung
und Entwicklung mit. Unter anderem war sie seit 2015 in
verschiedenen Funktionen bei der Siemens AG in Berlin tätig und
entwickelte dabei Lösungen in Simulation, Künstlicher Intelligenz
und Optimierung für den 3D-Druck.
Mit ihrer Berufung startet am Fachbereich die neue
Vertiefungsrichtung...
mehr lesen ...
Dienstag, September 09, 2025
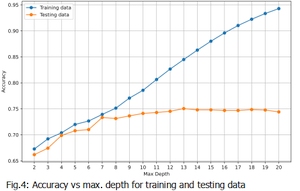
Interpretable Machine Learning in Procurement: Analysis and
Modeling of Sourcing Decisions using Decision Trees
Diese Bachelorarbeit im industriellen Kontext (Robert Bosch
GmbH) untersucht, wie sich Sourcing Decisions (SD) mittels
interpretierbarer Modelle automatisieren lassen – mit
Möglichkeit zur menschlichen Intervention. Zum Einsatz kommen
klassifikationsbasierte Entscheidungsbäume (Decision Trees, DT),
deren Struktur und Vorhersagen nachvollziehbar bleiben sollen.
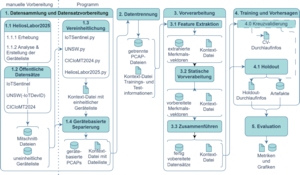
Vorgehen: Entsprechend des Data-Science-Workflows werden
Rohdaten analysiert, bereinigt und aufbereitet (u. a. Umgang mit
fehlenden/fehlerhaften Werten). Aus bestehenden Merkmalen werden
neue Features abgeleitet, kategoriale Merkmale numerisch kodiert
und numerische Merkmale in den Bereich −1 bis 1 skaliert. Das
Zielmerkmal wird...
mehr lesen ...
Präsentation auf der ACL 2025 SRW: Robin Wagner
Robin Wagner, Masterstudent im Fachbereich Informatik und
Medien an der THB, präsentierte im Juli 2025 ein Poster und
long Paper auf dem Student Research Workshop der ACL 2025 in Wien. Sein Beitrag
ist eine systematische Literaturübersicht zu Methoden, die
sogenannte Halluzinationen in Antworten großer Sprachmodelle
(LLMs) durch die Integration von Wissensgraphen während des
Inferenzprozesses reduzieren.
Während einer intensiven 90-minütigen Postersession...
mehr lesen ...
Lange Nacht der Wirtschaft 2025
Bei der 6. Langen Nacht der Wirtschaft in der
Kleeblattregion präsentierte sich das KI-Labor der
Technischen Hochschule Brandenburg mit einem eigenen Stand im
KMG-Klinikum in Kyritz. Vor Ort waren Professor Dr. Emanuel
Kitzelmann sowie die Masterstudierenden Albert Zacher
und Max Tepper, die Einblicke in ihr aktuelles Projekt zur
Verbindung von KI und Robotik gaben.
Im Mittelpunkt stand der vierbeinige Roboter Unitree Go2
EDU, der mit dem Open-Source-Framework ROS 2 für
autonome Navigation und Interaktion ausgestattet wurde. Die
Besucherinnen und Besucher...
mehr lesen ...
Instanzsegmentierung auf Edge AI-Plattformen: Integration von
Basler Hochgeschwindigkeitskameras und YOLO-Seg
In seiner Bachelorarbeit entwickelte Lasse Broer ein
performantes KI-System zur Instanzsegmentierung auf einem Jetson
AGX Orin, das Bilddaten einer Basler
Hochgeschwindigkeitskamera in Echtzeit mit einem
YOLO-Seg-Modell verarbeitet.
Im Mittelpunkt der Arbeit stand die vollständige Installation
und Konfiguration aller Komponenten sowie die Evaluation der
Bildverarbeitungspipeline hinsichtlich Genauigkeit,
Geschwindigkeit und Latenz. Zur Veranschaulichung entstand ein
Demonstrator auf Basis von NVIDIA DeepStream, der auf einer
Rampe zwei Objekte bei bis zu 198 Hz analysiert.
Das entwickelte Testframework erlaubte die gezielte
Variation zentraler Parameter (Präzision,...
mehr lesen ...
Mittwoch, Februar 26, 2025
Umgebung vor
Start
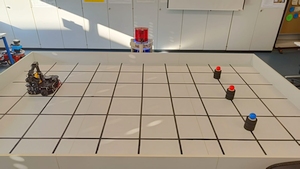
Masterprojekt von Arne Allwardt: Autonomer Lagerroboter mit
ROS2 und Manipulator
Im Rahmen seines Masterprojekts im WS24/25 entwickelte Arne
Allwardt einen autonomen mobilen Roboter auf Basis des
TurtleBot3 mit einem OpenManipulator-X-Arm. Ziel des
Projekts war es, einen Prototypen zu realisieren, der selbstständig
bestimmte Objekte an definierten Lagerplätzen aufsucht,
greift und zurückbringt.
Der Roboter kartiert mit Hilfe der SLAM Toolbox seine
Umgebung, lokalisiert sich über AMCL (Adaptive Monte Carlo
Localization) und steuert mit Nav2 gezielt Positionen an, an
denen blaue...
mehr lesen ...
KI-Labor begrüßt Laufroboter NOVA
Das KI-Labor der Technischen Hochschule Brandenburg hat mit NOVA
einen neuen Laufroboter in Betrieb genommen. Bei NOVA handelt es
sich um ein Modell vom Typ Go2 EDU Plus des Herstellers
Unitree, ausgestattet mit modernster Sensorik wie LIDAR, der
Middleware ROS 2 und frei programmierbar in Python.
NOVA kann Treppen steigen und unwegsames Gelände
meistern. Er erreicht eine Geschwindigkeit von bis zu
3,7 m/s und trägt Lasten bis 8 kg. Der
Roboter kann sowohl ferngesteuert als auch autonom
agieren und wird im Masterprojekt im Sommersemster
2025...
mehr lesen ...
Mittwoch, Januar 15, 2025
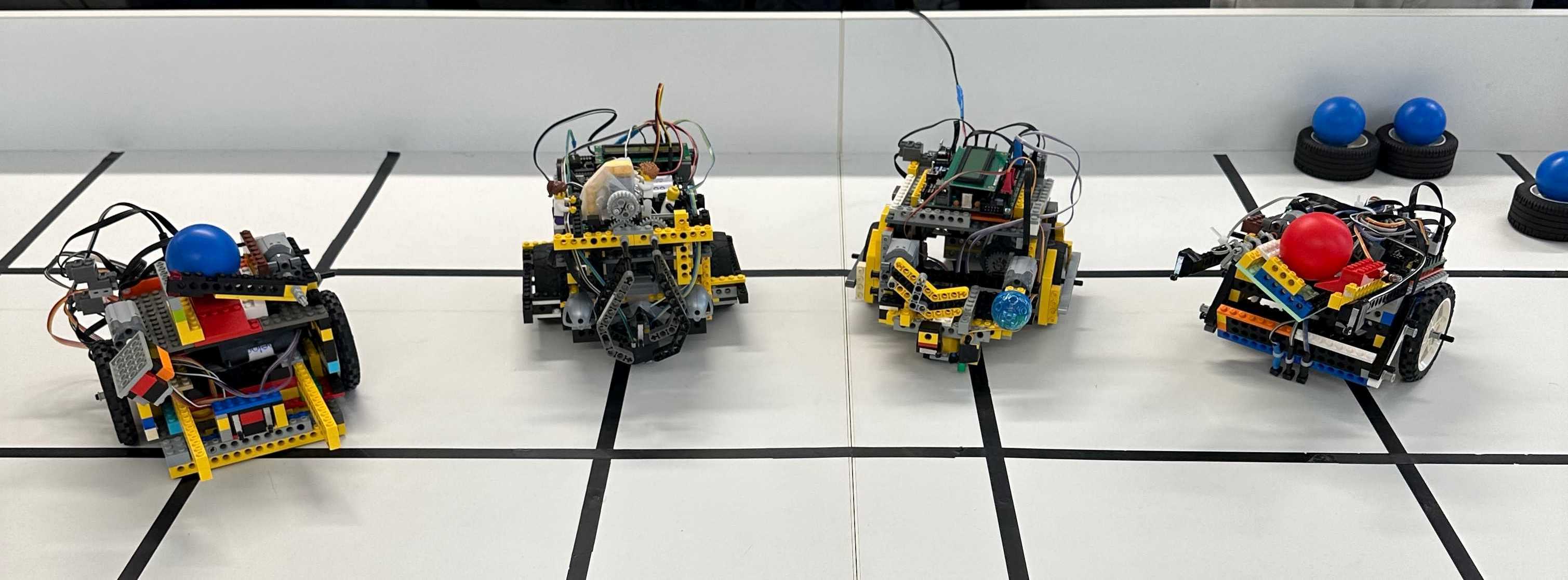
Autonome Intelligente Roboter – KI-Projekt im Wintersemester
2024/25
Im Projekt Künstliche Intelligenz des Wintersemesters
2024/25 entwickelten Studierende in 2- bis 3-köpfigen Teams
kreative Robotiklösungen, bei denen autonome und intelligente
Handlungen im Vordergrund standen. Ziel war es, Demonstratoren zu
realisieren, die nicht nur technisch funktionieren, sondern auch
einen Showcase-Charakter haben.
3 Anforderungen
- Autonom intelligent handeln
- Nützlich (perspektivisch)
- Showcase, Demonstrator
Ausgangspunkt war eine Auswahl verschiedener Robotersysteme:
Turtlebots, NAOs, AKSEN-Boards,
OpenManipulator-X und das leistungsstarke NVIDIA AGX
Orin. Nach einer dreiwöchigen Konzeptionsphase mit
intensiven Technik-Demos, individueller...
mehr lesen ...
Mittwoch, November 27, 2024
ZF Brandenburg: Datenanalyse mit KNIME
An zwei Workshoptagen, dem 06.11. und 27.11.2024, nahmen neun
Mitarbeitende der ZF Getriebe Brandenburg GmbH an einer
Weiterbildung zur Daten-Analyse und -Modellierung mit KNIME
an der Technischen Hochschule Brandenburg teil.
In vier aufeinander aufbauenden Modulen wurden zentrale
Kompetenzen zur datenbasierten Entscheidungsunterstützung
vermittelt. Modul 1 bot einen Überblick über die KNIME-Oberfläche,
Workflows und Best Practices. In Modul 2 stand ein konkreter
Anwendungsfall aus dem Vertrieb im Zentrum, bei dem es um die
Automatisierung datengetriebener Berichte ging.
Modul 3 widmete sich der Modellierung und Evaluation: Themen
wie...
mehr lesen ...
Automatisierung des Kundensupports in Softwareunternehmen durch
den Einsatz von Large Language Models (LLMs) und
Retrieval-Augmented Generation (RAG)
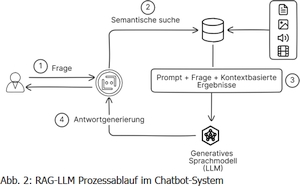
Die Masterarbeit entwickelt und evaluiert ein RAG-System
(Retrieval-Augmented Generation) zur teilweisen Automatisierung des
Kundensupports für ein Praxisverwaltungssystem (PVS) in
einem realen Unternehmen.
Die Arbeit stellt die theoretischen Grundlagen von RAG vor und
nutzt diese in der Konzeptionsphase zur Variantendiskussion. Die
besondere Herausforderung liegt in der Komplexität der eingesetzten
Technologien und der Einbettung des Systems in den realen
Anwendungskontext des Unternehmens.
Die praktische Umsetzung erfolgt durch die Entwicklung eines
Chatbots mit einer...
mehr lesen ...
FBI unterstützt ZF Brandenburg mit KI-Workshop
Ingenieure und Informatiker der „ZF Getriebe Brandenburg GmbH“
nahmen am 24.04.24 und 15.05.24 an einem Workshop im
Informatikzentrum der Technischen Hochschule Brandenburg teil, bei
dem sie sich gemeinsam mit Prof. Dr. Georg Merz, Prof. Dr. Emanuel
Kitzelmann und Ingo Boersch intensiv dem Thema „Künstliche
Intelligenz“ widmeten. Ziel der Veranstaltung war es, durch die
Diskussion praktischer Anwendungsfälle, die Klärung
zentraler Begriffe und praktische Hands-on-Erfahrungen ein
fundiertes Verständnis von KI und Data Science zu fördern.
In...
mehr lesen ...
THB zu Gast beim Netzwerk "Roboter im Bildungskontext"
Am 01.03.2024 nahmen Prof. Kitzelmann, Prof. Pohl und Ingo
Boersch für die Technische Hochschule Brandenburg am
Netzwerktreffen "Roboter im Bildungskontext" an der TU
Berlin teil. Ziel des Treffens war es, den Austausch über den
Einsatz von Robotiksystemen als Lehrmittel zu fördern – etwa
zur Vermittlung von KI-Methoden in Studium und Schule.
Die THB setzt Roboter bereits aktiv in der Lehre ein, unter
anderem zur Vermittlung praxisnaher Kompetenzen im Bereich
Künstliche Intelligenz. Das Netzwerk bietet dafür eine
wertvolle Plattform, um Ideen, Projekte und didaktische
Konzepte...
mehr lesen ...
Donnerstag, Februar 08, 2024
GPT als Schnittstelle zwischen Menschen und Robotern am
Beispiel eines rudimentären Bringe-Roboters im Szenario der
Pflege
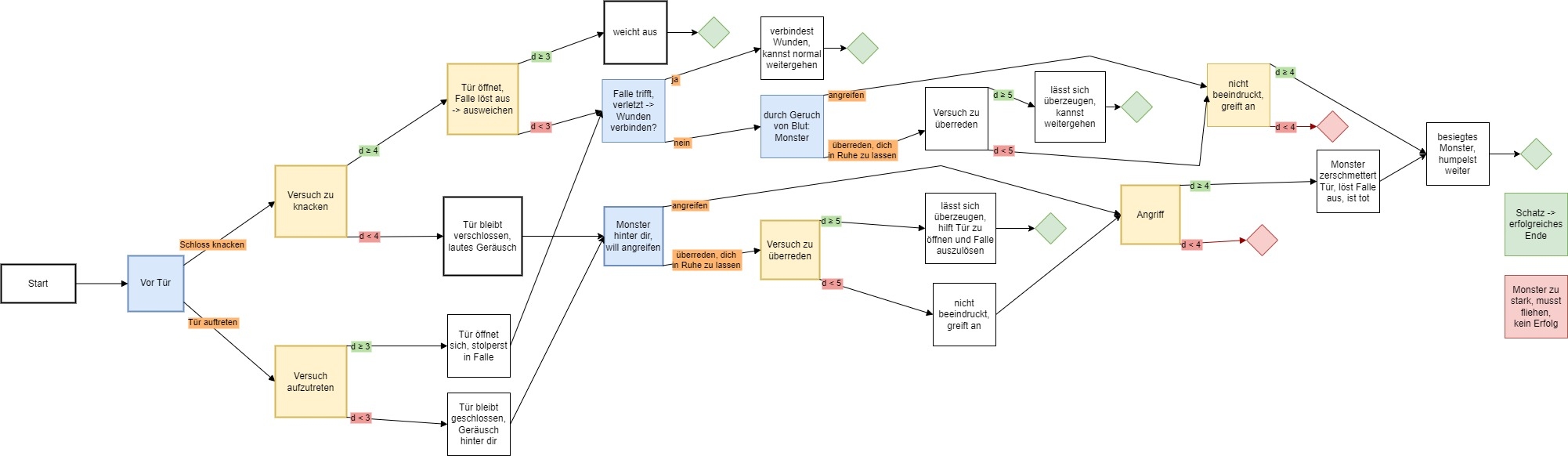
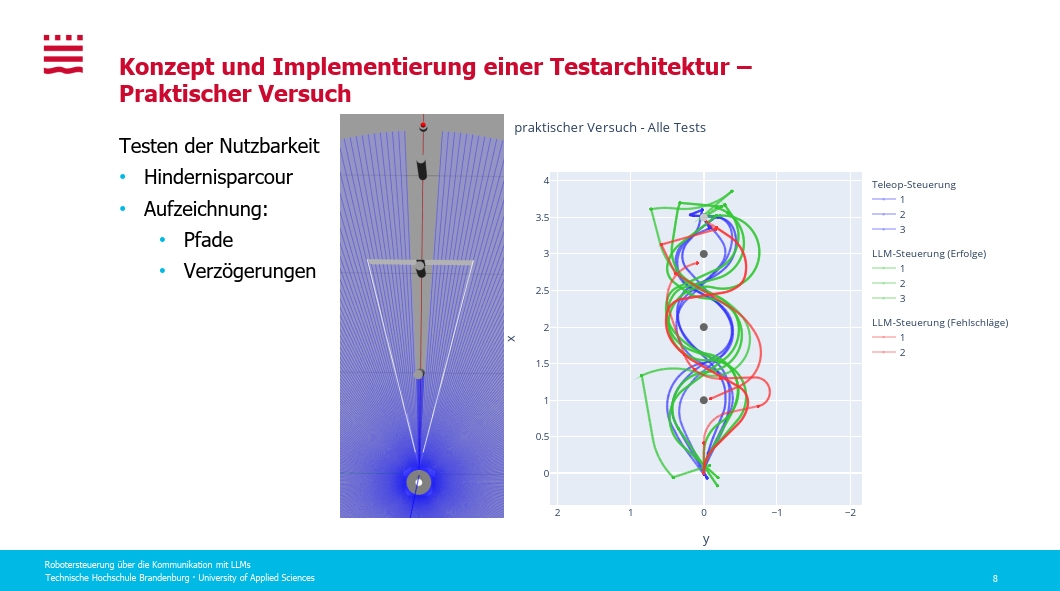
Im Rahmen des Masterprojektes "Künstliche Intelligenz - ChatGPT
in Action" im WS23/24 wurde ein Prototyp einer Robotersteuerung
entwickelt. Ziel des Projektes ist die Entwicklung und Evaluierung
eines Systems zur Steuerung eines Pflegeroboters durch
Kommunikation mit einem Large Language Model (LLM) am Beispiel
eines rudimentären Bringeroboters. Es geht um die Untersuchung
der Eignung des LLM als Schnittstelle zwischen einem Roboter und
einer körperlich eingeschränkten Person, um einfache Aufgaben in
der Sichtweite und unter Kontrolle des Nutzers zu übernehmen.
...
mehr lesen ...
LLMs zur Detektion von Phishing-Emails
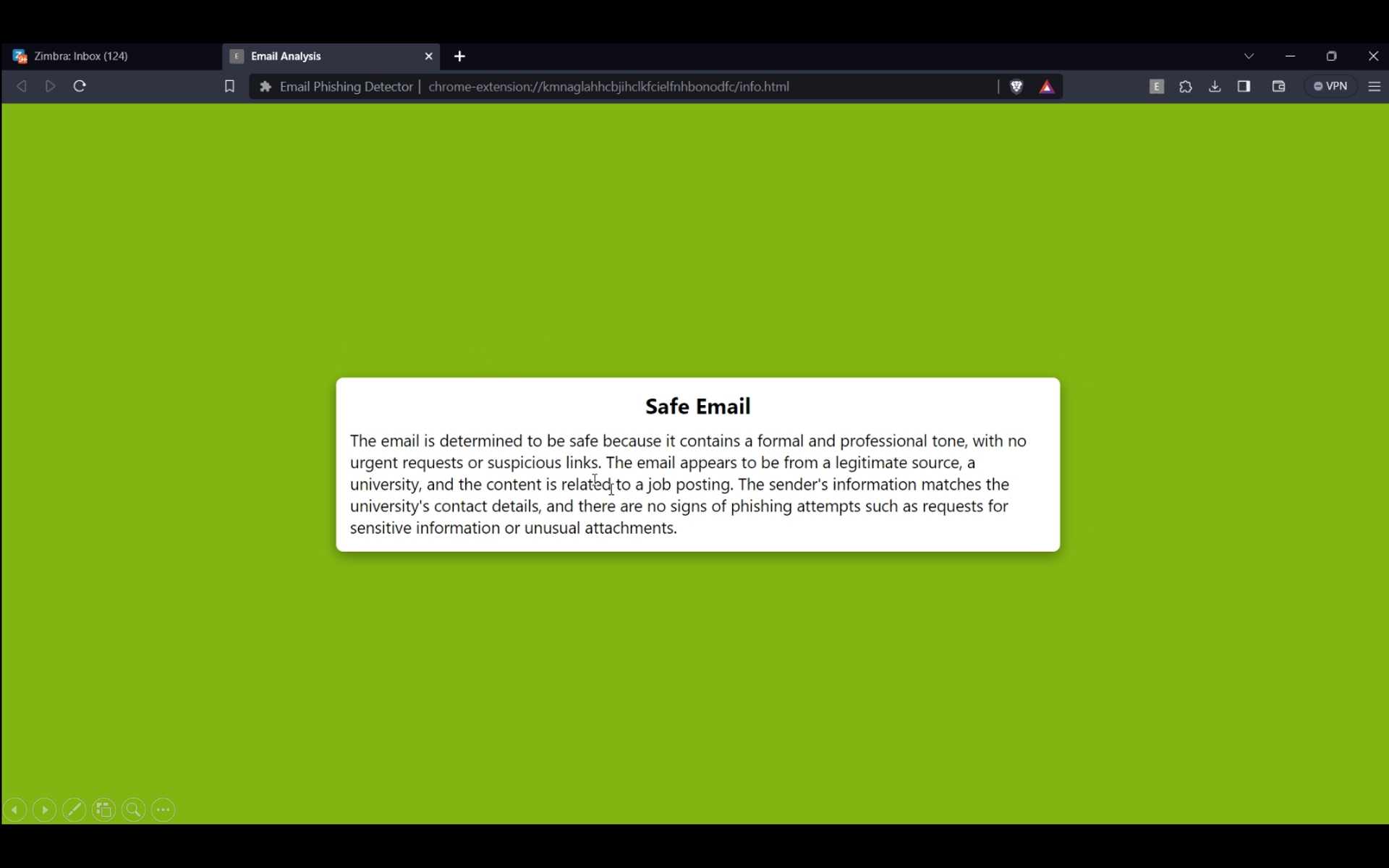
Im Rahmen des Masterprojekts "Künstliche Intelligenz - ChatGPT
in AKtion" im WS23/24 wurde von drei Erasmus-Studierenden ein
Prototyp für einen Email-Checker entwickelt, der mit Hilfe
eines Sprachmodells eine Email in Zimbra mit einem Chrome-Plugin
auf Anzeichen von Phishing überprüft
Das Prinzip besteht darin, dass der Emailtext mit einem
speziell entwickelten Prompt, der teilweise durch einen genetischen
Algorithmus optimiert wurde, mit GPT-3.5 klassifiziert wird.
Dabei berücksichtigt GPT bestimmte psychologische Aspekte [SMG22]
und kann bei Bedarf auch erklären, warum die Email
als...
mehr lesen ...
Mittwoch, Januar 17, 2024
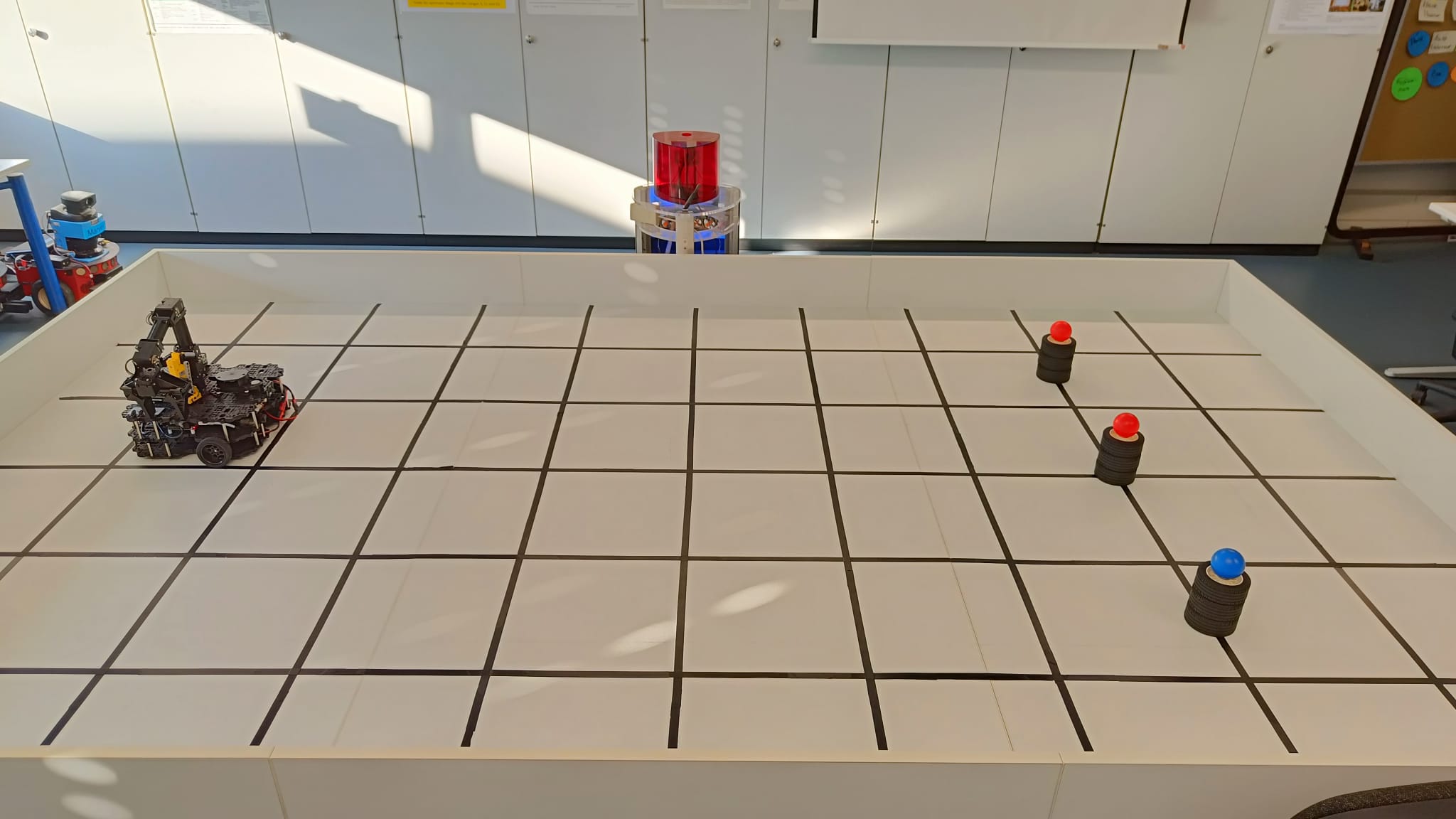
Pizzabote 2024 - Breitensuche praktisch
In diesem Bachelorprojekt geht es um die Konstruktion und
Programmierung eines Roboters, der Pizzas einzeln an Kunden
ausliefert. Die Welt ist formalisiert, nicht wirklich essbar und
dennoch real und physisch:
"Ihr Roboter erhält den Auftrag, eine oder mehrere Pizzen
auszuliefern. Das Streckennetz ist ein einfaches Gitter, in dem es
jedoch zu Störungen und damit zu unpassierbaren Kreuzungen kommen
kann. Die gute Nachricht ist, dass Sie über globales Wissen
verfügen und die aktuelle Karte der befahrbaren Wege dem Roboter
kurz vor dem Start zur Verfügung...
mehr lesen ...