Abschlussarbeiten im Labor für Künstliche Intelligenz


Die Masterarbeit untersucht, inwieweit eine passive paketbasierte Netzwerkverkehrsanalyse zur automatischen Klassifikation von Geräten in medizinischen IT-Infrastrukturen eingesetzt werden kann. Ziel ist die Unterstützung eines automatisierten Netzwerkinventars, das insbesondere im Krankenhausumfeld eine zentrale Rolle für IT-Sicherheit und Systemübersicht spielt.
Ausgangslage: Trotz der hohen Bedeutung aktueller Netzwerkinventare mangelt es an öffentlich verfügbarer Forschung zur automatisierten Geräteerkennung im Gesundheitswesen. In der Arbeit wird daher ein Proof of Concept zur Geräteklassifikation in medizinischen Netzwerken durch Reproduktion einer bestehenden Forschungsarbeit implementiert und evaluiert.

Datengrundlage:
Methodik: Auf Basis passiv aufgezeichneter Netzwerkpakete werden paketbasierte Merkmale extrahiert und mit überwachten Lernverfahren klassifiziert. Hierzu werden verschiedene Entscheidungsbaum- und Random-Forest-Modelle trainiert und anhand üblicher Metriken wie dem Macro-F1-Score evaluiert. Aufgrund unausgeglichener Datensätze erfolgt die Bewertung über aggregierte Vorhersagen. Bei der Evaluation muss das durch geräteweises Splitting verursachte Data Leakage beachtet werden. Ein Klassifikations-Ansatz aus [1] wird zur Analyse reproduziert.
Ergebnisse:
Fazit: Die Arbeit zeigt, dass verhaltensbasierte Geräteklassifikationsmethoden aus IoT-Netzwerken erfolgreich auf medizinische IT-Infrastrukturen übertragbar sind. Eine automatische Unterstützung bei der Inventarisierung von Krankenhausnetzwerken erscheint damit plausibel.
Kolloquium: 19.02.2026
Betreuer: Prof. Dr. Michael Pilgermann, Dipl.-Inform. Ingo Boersch
Download: A1-Poster
Lizenz: Creative Commons CC BY-NC-SA 4.0 - Namensnennung – Nicht kommerziell – Weitergabe unter gleichen Bedingungen 4.0 International
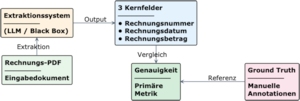
Die Masterarbeit untersucht die Leistungsfähigkeit von Large Language Models (LLMs) zur Extraktion strukturierter Rechnungsdaten aus PDF-Dokumenten. Der praktische Einsatzkontext ist die Berliner FinTech-Firma aifinyo AG, die monatlich rund 15.000 Rechnungen verarbeitet und eine robuste automatisierte Erfassung von Rechnungsnummer, -datum und -betrag benötigt.
Ausgangslage: Die bestehende OCR-Lösung (Gini) zeigt Schwächen bei variablen Rechnungslayouts. Die Arbeit prüft, ob LLM-basierte Verfahren eine signifikant robustere Alternative darstellen können.

Evaluierte Modelle und Strategien:
Evaluationsplattform: Es wurde eine webbasierte Plattform entwickelt, die Dokumente mit Ground-Truth verwaltet, Prompting-Strategien konfiguriert, automatisierte Ausführungen durchführt und sämtliche Metriken sowie Tokenverbrauch und Laufzeiten erfasst. Technische Basis: Ruby on Rails, PostgreSQL, einheitliche LLM-Service-API, Textextraktion mittels PDFPlumber und Tesseract.
Ergebnisse:
Fazit: LLM-basierte Methoden bieten eine klar überlegene Rechnungsdatenextraktion im Vergleich zur OCR-Lösung. In Kombination aus Genauigkeit, Layout-Robustheit und Stabilität stellt Claude 3 Sonnet mit Few-Shot-CoT den besten Ansatz dar. Empfohlen wird ein hybrides System (LLM-Hauptverarbeitung + OCR-Fallback). Potenzial zukünftiger Arbeiten: multimodale LLMs, Fine-Tuning und Kostenoptimierung.
Kolloquium: 03.11.2025
Betreuer: Prof. Dr. Emanuel Kitzelmann, Technische Hochschule Brandenburg; Prof. Dr. Roland Fassauer, CODE University of Applied Sciences
Download: A1-Poster, Abschlussarbeit
Lizenz: Creative Commons CC BY-NC-SA 4.0 - Namensnennung – Nicht kommerziell – Weitergabe unter gleichen Bedingungen 4.0 International

Kameras sind unter Wasser nur eingeschränkt für die Hinderniserkennung einsetzbar. Die Bachelorarbeit erkundet daher die Verwendung eines Forward-Looking-Sonars (FLS) auf dem „Sonobot-5“ der Firma EvoLogics. Verglichen werden zwei klassische, ein probabilistischer und ein Deep-Learning-basierter Ansatz mit dem Ziel, eine echtzeitfähige Hinderniserkennung zur Kollisionsvermeidung zu ermöglichen.
Forward-Looking Sonar (FLS): Ein FLS sendet Schallimpulse kegelförmig nach vorne aus; reflektierte Echos werden empfangen und als zweidimensionale Abbildung der Umgebung (Strahlenwinkel, Entfernung) dargestellt.
Ausgewählte Ansätze:
Vorgehensweise: Am Werbellinsee wurden mit dem Sonobot-5 FLS-Daten verschiedener Objekte aufgenommen. Die Ansätze wurden implementiert, parametrisiert und in ROS2 (C++) getestet. Anschließend wurden alle Verfahren in einem Praxistest am Werbellinsee hinsichtlich Erkennungsleistung und Stabilität evaluiert.
Evaluationsmetriken: TP, FP, FN sowie Precision, Recall, F1, IoU und Laufzeit (ms).
Ergebnisse:
Fazit: Vier Methoden zur Hinderniserkennung in FLS-Daten wurden erfolgreich implementiert. Der probabilistische Ansatz ist aufgrund geringer Laufzeit, hoher Erkennungsquote und Stabilität am besten für die Echtzeit-Hinderniserkennung geeignet. Das Deep-Learning-Verfahren zeigt eine hohe Genauigkeit bei der Konturerkennung und eignet sich potenziell eher für präzise Konturen/Klassifikation.
Kolloquium: 06.10.2025
Betreuer: Prof. Dr. Emanuel Kitzelmann, Technische Hochschule Brandenburg; Iván Santibañez Koref, EvoLogics GmbH
Download: A1-Poster, Abschlussarbeit
Lizenz: Creative Commons CC BY-NC-SA 4.0 - Namensnennung – Nicht kommerziell – Weitergabe unter gleichen Bedingungen 4.0 International
Diese Bachelorarbeit im industriellen Kontext (Robert Bosch GmbH) untersucht, wie sich Sourcing Decisions (SD) mittels interpretierbarer Modelle automatisieren lassen – mit Möglichkeit zur menschlichen Intervention. Zum Einsatz kommen klassifikationsbasierte Entscheidungsbäume (Decision Trees, DT), deren Struktur und Vorhersagen nachvollziehbar bleiben sollen.
Vorgehen: Entsprechend des Data-Science-Workflows werden Rohdaten analysiert, bereinigt und aufbereitet (u. a. Umgang mit fehlenden/fehlerhaften Werten). Aus bestehenden Merkmalen werden neue Features abgeleitet, kategoriale Merkmale numerisch kodiert und numerische Merkmale in den Bereich −1 bis 1 skaliert. Das Zielmerkmal wird linear in fünf Klassen gebinnt, die das Modell später vorhersagt.
Train/Test-Split: Der verarbeitete Datensatz wird in Trainings- und Testmenge aufgeteilt; die Klassenverteilungen der Teilmengen entsprechen derjenigen des Gesamtdatensatzes und gelten damit als repräsentativ.
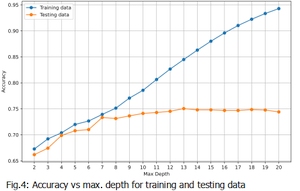
Hyperparameter-Tuning: Per Gridsearch werden verschiedene Setups
verglichen; das gini-Kriterium zeigt die besten mittleren
Genauigkeiten. Die Analyse der Genauigkeiten über der Baumtiefe weist ab
Tiefe 8 eine zunehmende Überanpassung aus, weshalb eine maximale Tiefe
von 7 als optimal gewertet wird. Domänenexperten bestätigen, dass das
resultierende Modell für „normale“ Fälle gut geeignet ist; für
Spezialfälle fehlen teils relevante Informationen oder deren Nutzung im
Modell.
Vergleich zu anderen ML-Ansätzen: Regressions-Entscheidungsbäume und Random-Forest-Modelle liefern leicht höhere Genauigkeiten; der Zugewinn rechtfertigt jedoch nicht den Verzicht auf die Einfachheit und Interpretierbarkeit der Klassifikations-DTs.
Fazit: Die Modellierung von Sourcing Decisions mit den vorliegenden Daten und ML ist grundsätzlich möglich. Das Modell meistert Standardszenarien, während besondere Fälle zusätzliche Merkmale bzw. Regeln erfordern.

Kolloquium: 09.09.2025
Betreuer: Prof. Dr. Emanuel Kitzelmann, Technische Hochschule Brandenburg; Marc-Alexander Frey, Robert Bosch GmbH
Download: A1-Poster
Creative Commons – CC BY-NC-SA – Namensnennung – Nicht kommerziell – Weitergabe unter gleichen Bedingungen 4.0 International

In seiner Bachelorarbeit entwickelte Lasse Broer ein performantes KI-System zur Instanzsegmentierung auf einem Jetson AGX Orin, das Bilddaten einer Basler Hochgeschwindigkeitskamera in Echtzeit mit einem YOLO-Seg-Modell verarbeitet.
Im Mittelpunkt der Arbeit stand die vollständige Installation und Konfiguration aller Komponenten sowie die Evaluation der Bildverarbeitungspipeline hinsichtlich Genauigkeit, Geschwindigkeit und Latenz. Zur Veranschaulichung entstand ein Demonstrator auf Basis von NVIDIA DeepStream, der auf einer Rampe zwei Objekte bei bis zu 198 Hz analysiert.
Das entwickelte Testframework erlaubte die gezielte Variation zentraler Parameter (Präzision, Auflösung, Modellvariante, Farbformat) zur Bewertung ihrer Auswirkungen auf die Gesamtperformance. In 16 Experimenten wurden objektive Messwerte (z. B. Latenz) und subjektive Kriterien (Segmentierungsqualität) erfasst.
Die Ergebnisse zeigen, dass eine robuste Instanzsegmentierung auf Edge-Hardware mit sorgfältiger Abstimmung möglich ist – auch bei extremen Anforderungen an Echtzeitfähigkeit und Geschwindigkeit.

Kolloquium: 31.03.2025
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr. Emanuel Kitzelmann
Download: A1-Poster

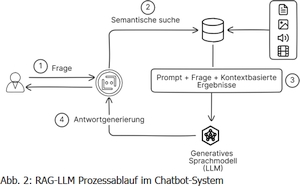
Die Masterarbeit entwickelt und evaluiert ein RAG-System (Retrieval-Augmented Generation) zur teilweisen Automatisierung des Kundensupports für ein Praxisverwaltungssystem (PVS) in einem realen Unternehmen.
Die Arbeit stellt die theoretischen Grundlagen von RAG vor und nutzt diese in der Konzeptionsphase zur Variantendiskussion. Die besondere Herausforderung liegt in der Komplexität der eingesetzten Technologien und der Einbettung des Systems in den realen Anwendungskontext des Unternehmens.
Die praktische Umsetzung erfolgt durch die Entwicklung eines Chatbots mit einer REST-API in TypeScript und einer GUI in JavaScript. Die Datenbasis für den Vectorstore wird automatisch aus Confluence extrahiert und aufbereitet. Der Evaluator ist in Python implementiert. Die Evaluation des Systems erfolgt zum einen über das LangSmith Framework, das die Performance anhand verschiedener Kriterien wie Latenz, Konsistenz, Prägnanz und Relevanz der Antworten misst, und zum anderen über eine manuelle Bewertung der Antworten durch Fachexperten. Insgesamt bestätigen die Tests, dass der Chatbot die Effizienz und Qualität des Kundensupports steigern kann.

Kolloqium: 29.07.2024
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr. Georg Merz
Download: A1-Poster
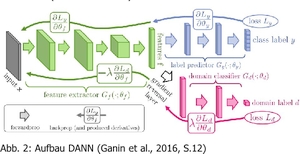
Die Arbeit im realen industriellen Kontext konzentriert sich auf die Implementierung des Domain-Adversarial Trainings neuronaler Netze (DANN) zur Überbrückung einer Domänenlücke zwischen verschiedenen Kameratypen, speziell Industriekameras und Smartphone-Kameras. Ziel der Arbeit ist es, ein Regressionsmodell zu trainieren und dieses gegen einen anderen Ansatz zu evaluieren, der Contrastive Learning for Unpaired Image-to-Image Translation (CUT) verwendet.
Die Trainingsdaten bestehen aus vorverarbeiteten Bildern von Laserschnittkanten. Um die Untersuchungen möglichst praxisnah zu gestalten, wird die Anzahl der verwendeten gelabelten und ungelabelten Bilder begrenzt. Durch die Anwendung von 3-way-holdout und einer Hyperparameter-Suche wird ein optimiertes DANN-Modell ausgewählt.
In den Ergebnissen zeigt sich, dass DANN in der Zieldomäne bessere Ergebnisse erzielt als bisherige Regressionsmodelle, jedoch die Domänenlücke nicht vollständig schließt. Bei einem Vergleich mit CUT stellt sich heraus, dass beide Ansätze ihre eigenen Vor- und Nachteile haben, sodass keine eindeutige Empfehlung ausgesprochen werden kann.

Kolloqium: 04.10.2023
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr.-Ing. Jochen Heinsohn, Aastha Aastha, TRUMPF SE + Co. KG
Download: A1-Poster
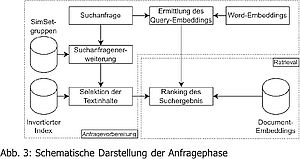
Die Arbeit konzentriert sich auf die Evaluation eines Word-Embedding-basierten Information-Retrieval-Systems, das von der Fraunhofer-Gesellschaft zum Patent angemeldet wurde. Ein besonderes Merkmal des IR-Systems ist die Verwendung von "SimSets" als zentrale Datenstruktur, die dazu dient, die Zeit für die Ermittlung der Suchergebnisse zu minimieren. Die Arbeit vergleicht dieses System mit einer Volltextsuche und einer durch einen domänenspezifischen Thesaurus erweiterten Volltextsuche, um deren Effektivität zu bewerten.
In der Arbeit werden drei verschiedene Evaluationsmethoden vorgestellt: Online-Evaluation, Interactive-Evaluation und die Testdatensatz-basierte Evaluation, die dann für die Untersuchung verwendet wird.
Die Ergebnisse zeigen, dass das Word-Embedding-basierte IR-System durch die Verwendung von SimSets in der Lage ist, zusätzliche Textinhalte im Vergleich zu einer herkömmlichen Volltextsuche zu ermitteln. Zudem ist die Effektivität des Systems bei einer domänenspezifischen Textsammlung vergleichbar mit einer Volltextsuche, die durch einen domänenspezifischen Thesaurus erweitert wird.

Kolloqium: 19.06.2023
Betreuer: Prof. Dr.-Ing. Jochen Heinsohn, Prof. Dr. rer. nat. Thomas Hoppe (Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V.)
Download: A1-Poster
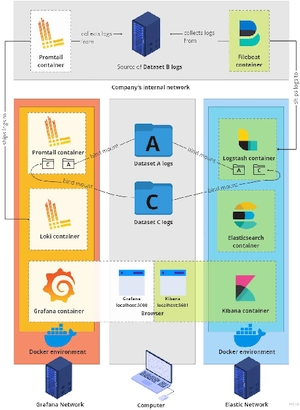
Diese Arbeit analysiert zwei Gruppen von Open-Source-Software für Log-Management und Log-Analyse: den Elastic Stack und den Grafana Stack. Jeder Stack besteht aus einem Log-Aggregator, einer Suchmaschine, die auch als Datenspeicher dient, und einer Browser-Schnittstelle. Das Ziel der Arbeit ist der Vergleich der beiden Log-Management-Stacks in einer ressourcenbeschränkten Umgebung. Hierbei sollen typische Anwendungsdaten ausgewählt und die Stacks beim Einlesen und Abfragen bezüglich der Ressourcennutzung und Abfrageleistung evaluiert werden. Zusätzlich soll ein Überblick über die Funktionalität der Stacks hinsichtlich der geplanten Anwendungsbereiche gegeben werden. Die besondere Herausforderung besteht in der Einbindung in einen konkreten Anwendungskontext bei der forsa GmbH und dem Umgang mit vielen verschiedenen Technologien.
Der Vergleich erfolgt nach vier selbst definierten Anforderungen:
Die Komponenten jedes Stacks wurden als Docker-Container ausgeführt, die so konfiguriert waren, dass verschiedene Logs einlesen und analysieren, um sie durchsuchbar und filterbar zu machen. Drei verschiedene Log-Sets wurden eingelesen: JSON-, Apache- und PostgreSQL-Format-Logs. Die Leistung der Suchmaschinen wurde getestet, indem Abfragen über ihre Browser-Schnittstellen ausgeführt wurden. Zwei Abfragen, die sich in Zeitrahmen und/oder Schlüsselwörtern unterschieden, wurden für jeden Datensatz modelliert. Die Abfragen wurden dann jeweils 10 Mal auf den Suchmaschinen jedes Stacks (Elasticsearch und Loki) ausgeführt.
Der Elastic Stack zeigt einen höheren Ressourcenverbrauch als Grafana beim Einlesen und Indizieren aller Datensätzen. Beide Stacks hatten den höchsten Ressourcenverbrauch beim Einlesen von PostgreSQL-Logs. In Bezug auf die Unterstützung von Integrationen zeigten beide Stacks einen ähnlichen Umfang. Die Arbeit empfiehlt die Stacks für verschiedene Einsatzbereiche: Der Elastic Stack ist geeignet für die langfristige Speicherung von Archivlogs und der Grafana Stack für die Echtzeit-Log-Aggregation und -Überwachung.

Kolloqium: 30.03.2023
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr.-Ing. Jochen Heinsohn, Harald Meiß (forsa Gesellschaft für Sozialforschung und statistische Analysen mbH)
Download: A1-Poster

Diese Arbeit befasst sich mit dem Entwurf und der Implementierung eines Algorithmus zur Erzeugung von Indoor-Navigationsnetzwerken aus Gebäudekarten. Die Netze sind Straßenkarten und sollen zur Navigation von Fußgängern im Gebäude dienen. Dazu sind die Anforderungen zu definieren, die theoretischen Grundlagen der algorithmischen Geometrie darzustellen, Algorithmen auszuwählen und zu evaluieren.
Der ausgewählte Algorithmus soll in der Anwendung des Unternehmens implementiert und evaluiert werden. Die besonderen Schwierigkeiten ergeben sich aus der Integration in eine reale Anwendung und der Einarbeitung in ein neues umfangreiches Wissensgebiet.
Die Kartendaten aus der relationalen Datenbank werden vorverarbeitet, ergänzt und in eine GeoJSON-Datei umgewandelt. Als Methode wird die 2D-Zellzerlegung in Kombination mit der Delaunay Triangulation gewählt. Die Implementierung erfolgt in JavaScript und besteht aus der Zellzerlegung und der Erstellung eines zusammenhängenden Graphen.

Kolloqium: 21.03.2023
Betreuer: Prof. Dr.-Ing. Jochen Heinsohn, Dipl.-Inform. Ingo Boersch, B.Sc. Informatik Georgios Nikas (snacc-it GmbH)
Download: A1-Poster
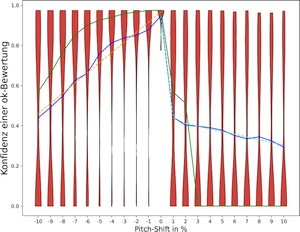
Ein akustikbasiertes Prüfsystem für Steckverbindungen soll auf akustische Einflussfaktoren untersucht werden, um es prozessfähig zu integrieren. In der Vergangenheit wurden einzelne Aspekte der Realumgebung durch Feldtests betrachtet, um das System abzusichern. Ziel dieser Arbeit ist es, eine systematische Teststrategie zur Simulation von Störfaktoren auf das KI-System zu entwickeln, anzuwenden und eine Analyse basierend auf berechneten Ergebnissen durchzuführen, um das Bewertungsverhalten des Systems zu ermitteln und vorhersehbar zu machen.
Die systematische Teststrategie beinhaltet die Modifikation von Eingabedaten für das KI-System und die Erfassung von Veränderungen im Bewertungsverhalten. Für die Modifikation werden Techniken der Signalverarbeitung angewandt, um Varianz in den Daten und Einflussfaktoren auf das System zu simulieren. Techniken wie Frequenzfilterung, Tonverschiebung und Interferenz von Stör- und zu bewertenden Geräuschen sind integraler Bestandteil der Modifikationskette. Nachdem eine modifizierte Aufnahme erzeugt wurde, erfolgt eine Bewertung durch das KI-System, welches eine Liste binärer Klassifikationen und zugehörige Konfidenzwerte ausgibt. Zur Generierung analysierbarer Bewertungen wurde ein spezieller Datensatz erstellt, der aus Aufnahmen von Steckverbindungen eines bestimmten Steckertyps und verschiedenen Störgeräuschen besteht.
Die Analyse führte zu einer Rangliste der Störfaktoren, zu den für die KI-Bewertung relevanten Frequenzbereichen und zur Reaktion des Systems auf die Tonverschiebung. Die stärksten Einflussfaktoren waren das Rascheln mit ISO-Clips und einmaliges Händeklatschen. Die wichtigsten Frequenzbereiche für die Bewertung der KI lagen zwischen 4410 bis 6615 und 15434 bis 17640 Hz. Die Reaktion des Systems auf die Tonverschiebung zeigte einen Abfall der Konfidenz, wobei der Abfall bei einer Verschiebung in den hochfrequenten Bereich stärker war. Durch die Analyse konnten Funktionen erstellt werden, die die Reaktion der KI auf verschiedene Einflüsse beschreiben, und somit konnte das Erreichen von Bewertungsgrenzen vorhergesagt werden.

Kolloqium: 26.01.2023
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr.-Ing. Jochen Heinsohn, Philipp Stephan (M.Sc.), Dipl.-Ing. (FH) Marcel Preibisch (Mercedes-Benz AG)
Download: A1-Poster

Die Aufgabe besteht darin, einen systematischen Review über die Erkennung von Gebärdensprachen durchzuführen, um einen Überblick über die vorhandenen Gebärdensprachenerkennungstechnologien zu geben. Die Forschungsfrage lautet: "Welche Anwendungen mit welchen Bedingungen weisen die visuellen Gebärdensprachenerkennungen auf?" Die Arbeit konzentriert sich auf Technologien, die Kameras verwenden, um Gebärden zu erfassen, und zielt darauf ab, praktisch umsetzbare Anwendungen herauszuarbeiten und deren Umsetzungsvoraussetzungen zu definieren.
Die Literatur wird mithilfe von Suchmaschinen und dem booleschen Suchverfahren gesucht. Die Auswahl der Literatur erfolgt anhand von festgelegten Ein-, Ausschluss- und Qualitätskriterien. Die Einschlusskriterien beinhalten, dass die Literatur im Jahr 2022 veröffentlicht wurde, auf Deutsch oder Englisch verfasst ist, aus dem Informatikbereich stammt und dynamische visuelle Eingaben der Technologien beinhaltet. Das Ausschlusskriterium exkludiert das Erkennen von Gesten, die nicht zu einer Gebärdensprache gehören. Die Qualitätskriterien bewerten, wie akkurat eine Quelle ihre Ergebnisse darstellt. Die ausgewählten Artikel werden nach Qualitätspunkten sortiert und diejenigen mit einer Punktzahl von über vier werden für den Review verwendet.
Die ausgewählten Literaturen stellen Technologien vor, die zwischen sechs und 1295 Klassen erkennen können und Sprachen wie Englisch, Chinesisch, Argentinisch, Deutsch und Indonesisch erkennen können. Die Erkennung geschieht entweder zu isolierten Wörtern oder zusammenhängenden Gebärden. Es fehlen jedoch oft Angaben, die wichtig zur Bestimmung der Anwendbarkeit sind, wie zum Beispiel die benötigte Rechenleistung. Mit bestimmten Annahmen könnten fünf der Technologien in Bereichen wie Infopunkten oder Apps einsetzbar sein. Es wird festgestellt, dass die Quellen keine deutlichen Anwendungen für die vorhandenen Gebärdensprachenerkennungen definieren, aber mit guter Qualität der Quelle lassen sich Schlüsse auf mögliche Einsatzfelder der Technologien ziehen.
Kolloqium: 07.10.2022
Betreuer: Prof. Dr. Rolf Socher, Dipl.-Inform. Ingo Boersch
Download: A1-Poster
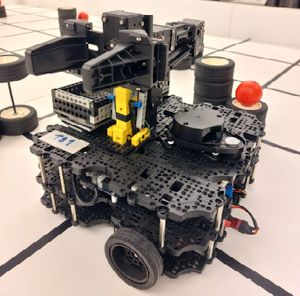
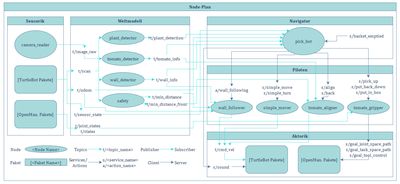
Diese Arbeit befasst sich mit der Entwicklung eines Demonstrators für einen mobilen Pflückroboter im Rahmen der Einführung von ROS 2 im Labor für Künstliche Intelligenz.
Hierzu gehören der Hardwareaufbau und insbesondere die Konzeption, Umsetzung und Evaluation einer geeigneten Software-Architektur in ROS 2. Die besondere Schwierigkeit der Arbeit besteht in der notwendigen Erschließung von Anwendungswissen zu ROS 2 und der Lösung vielfältiger Probleme realer Robotik. Das Szenario ist sinnvoll und ausreichend komplex zu definieren und mit seinen Rahmenbedingungen zu beschreiben. Die erstellte Applikation soll geeignet evaluiert und vollständig zur Weiterentwicklung und Inbetriebnahme dokumentiert werden.

Kolloqium: 06.10.2022
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr.-Ing. Jochen Heinsohn
Download: A1-Poster
Ziel der Arbeit ist die Entwicklung eines künstlichen Bewegungsapparates für virtuelle Kreaturen (sog. „Swimbots“), welches aufbauend auf dem KipEvo-Projekt in einer in Unreal Engine implementierten Simulationsumgebung der Evolution unterzogen werden. Die Wirksamkeit der Swimbots wird durch Experimentdurchläufe untersucht und diskutiert.
Konzept
Die Swimbots werden als Mehrkörpersystem mit mehreren kinematischen Ketten modelliert. Die Drehmomente der Gelenke werden durch ein neuronales Netz berechnet, das auf vielfältige Eingangsreize aus externen und Propriozeptoren reagiert. Die ausgabe der Drehmomente erfolgt in die Physik-simulation der Enreal Engine. Sowohl die Körperbeschreibung (Baum) als auch die Wichtungen des neuronalen Netzes werden in der Evolution durch genetische Operatoren 8Mutation) verändert, so dass neuartige Individuen entstheen, die ebenfalls am Wettstreit um Futter teilnehmen.
Jede virtuelle Kreatur wird aus einem Genotyp gebildet, in welchem Basiseigenschaften (wie z.B. die Sichtfähigkeit oder Reproduktionseigenschaften), die Körperstruktur und genexpressive Eigenschaften in Form einer JSON-Struktur gespeichert sind. Diese bilden die Grundlage für die Verhaltensweise, sowie den Körperbau der Individuen ab. Eine erfolgreiche Evolution der Swimbots hängt von der Zusammensetzung dieser Eigenschaften sowie der sich daraus bildenden Anpassungsfähigkeit ab. Durch asexuelle Reproduktion sind die Swimbots in der Lage Nachkommen zu erzeugen. Dies wird durch die Aufnahme von Energie erreicht, welche die Swimbots in Form von Nahrungsobjekten in der Simulationswelt aufsammeln können. Eine geeignete Bewegungsmechanik, durch welche eine Fortbewegung zur Nahrung ermöglicht wird, sorgt für das Überleben der Kreatur.
Durch das integrierte Ökosystem können Eigenschaften beeinflusst werden, wodurch sich der Evolutionsverlauf der Swimbots verändern kann. Die simulation kann unter Beibehaltung der Physikmodellierung bis zu 10fach beschleunigt werden.

Kolloqium: 13.09.2022
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr.-Ing. habil. Michael Syrjakow
Download: A1-Poster, Abschlussarbeit

Diese Arbeit befasst sich mit der Inbetriebnahme eines Turtlebot3-Roboters und der Evaluation eines Moduls der Navigationskomponente NAV2 im Gesamtsystem ROS2/Foxy. Das Modul ist die Lokalisierungskomponente AMCL, das in Open Source einen adaptiven Partikelfilter realisiert. Der Quelltext der zu evaluierenden Komponente liegt also vor und kann zur Einsichtnahme, ggf. sogar durch eigenes Kompilieren herangezogen werden.
Die Arbeit liefert eine eingehende Beschreibung der Funktionsweise und Einbettung von AMCL sowie eine Beurteilung der Leistungsfähigkeit anhand von Experimenten im Simulator Gazebo als auch mit dem realen Roboter. Mit den durch SLAM erstellten Karten werden sowohl das Kidnapped Robot-Problem als auch das Wake Up-Problem evaluiert, jeweils mit korrekter oder leicht fehlerhafter Karte.
Im Ergebnis trat bei jeweils 5fach-wiederholten Versuchen eine maximale Dauer bis zur korrekten Lokalisierung von knapp 3 Minuten auf.
Kolloqium: 30.03.2022
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr.-Ing. Jochen Heinsohn
Download: A1-Poster

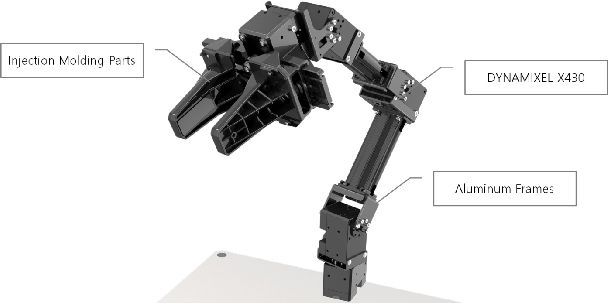
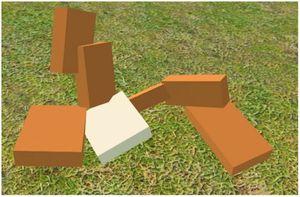
Im Rahmen dieser Bachelorarbeit wird der Greifarm OpenManipulator-X der Firma ROBOTIS in Betrieb genommen. Der OpenMANIPULATOR-X ist ein Greifarm der Firma ROBOTIS, der mit dem Robot Operating System 2 (ROS2) betrieben wird. Für diese Arbeit wird er auf einer stationären Basisplatte montiert. Alternativ besteht die Möglichkeit ihn auf dem mobilen Roboter TurtleBot3 WafflePi zu montieren.
Es werden ein Überblick über die grundsätzlichen Vorgänge und Prozesse bei dessen Nutzung gegeben sowie die Möglichkeiten der Steuerung erprobt. Weiterhin wird die Steuerung mittels Handlungsplanung ermöglicht. Hierzu ist der Stand der Forschung auf dem Gebiet der automatischen Handlungsplanung dargestellt. Als geeignetes Planungsverfahren wird "Partial Order Planning Forward" implementiert und einem selbstgewählten Szenario (Blöckewelt) praktisch demonstriert.

Kolloqium: 24.02.2022
Betreuer: Prof. Dr.-Ing. Jochen Heinsohn, Dipl.-Inform. Ingo Boersch
Download: A1-Poster, Abschlussarbeit
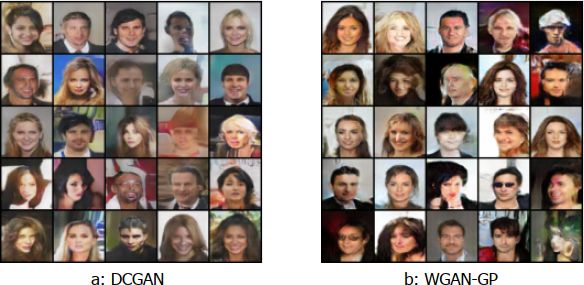
Generative Adversarial Networks (GANs) sind ein aktueller Ansatz im Bereich der Deep Neural Networks. Diese Netzwerke sind in der Lage anhand von hochdimensionalen Trainingsdaten (speziell Bildern) die Verteilung der Daten zu erlernen und erfolgreich Generatoren für diese Verteilung hervorzubringen. Das Ziel dieser Arbeit besteht in der Auswahl, Implementierung und Evaluation moderner GANs zur Synthese von Bildern menschlicher Gesichter. Die besondere Schwierigkeit besteht in der Erschließung und Komplexität der theoretischen Grundlagen, einer korrekten Implementierung und insbesondere in der Auswahl und Umsetzung geeigneter Evaluationsverfahrens zur Beurteilung der Güte der Generatoren.
Im Rahmen der Arbeit wurden drei bekannte GAN-Modelle SGAN, DCGAN, und WGAN-GP implementiert. Die Implementierung erfolgte in der Programmiersprache Python mit PyTorch. Zur Visualisierung der Ausgabe-Daten und der Ergebnisse wurde TensorBoard verwendet. Das Training der GAN-Modelle wurde auf einer NVIDIA Titan RTX Grafikkarte mit CUDA 11.1 durchgeführt.

Die Qualität der durch SGAN, DCGAN und WGAN-GP generierten Bilder wurde qualitativ und quantitativ überprüft. Die Fréchet Inception Distance (FID) Metrik wurde implementiert und für die quantitative Bewertung verwendet. Die qualitative Evaluierungsmethode erfolgt objektiv und auf menschlicher Basis. Hierfür wurde das Konzept der Rapid Scene Categorization-Methode verwendet. Beide Bewertungsmethoden zeigten, dass das DCGAN-Modell bessere Bilder als WGAN-GP- und SGAN-Modell erzeugt.
Kolloqium: 10.02.2022
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr.-Ing. Jochen Heinsohn
Download: A1-Poster,, Abschlussarbeit
Das Ziel dieser Bachelorarbeit liegt in der Gegenüberstellung von mindestens zwei Frameworks zum Management von Data Science-Experimenten. Hierbei ist der Bedarf, die Szenarien, die Einsatzbereiche und funktionalen Angebote derartiger Frameworks theoretisch zu erarbeiten und an einem konkreten Beispiel (mindestens Klassifikation mit Hyperparameteroptimierung) mit Blick auf die Nutzung in einem KMU zu evaluieren.
Eine wichtige nichtfunktionale Anforderung ist die Verständlichkeit, Nachvollziehbarkeit und Wiederholbarkeit der Arbeit.
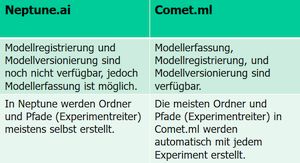
In der Arbeit werden die Frameworks Neptune.ai und Comet.ml gegenübergestellt. Nach den theoretischen Grundlagen zu MLP, CNN und Experimentverwaltung, werden die beide Frameworks anhand von ausgewählten Kriterien verglichen.
Im praktischen Teil der Bachelorarbeit werden Experimente zur Bildklassifizierung mit dem MNIST-Datensatz mit MLP und CNN in beiden Frameworks durchgeführt und verglichen. Die Unterschiede der beiden Frameworks werden in den Experimenten anhand bestimmter Kriterien wie Versionskontrolle, Abhängigkeitsmanagement, Datenversionierung, Modellversionierung, Modellregistrierung, Artefakten laden und Proto kollierung von Metadaten untersucht.

Kolloqium: 07.02.2022
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr.-Ing. Jochen Heinsohn
Download: A1-Poster
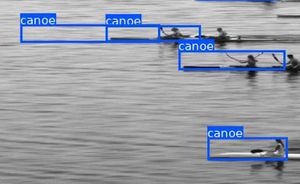
Ziel der Arbeit sind Deep Learning-Methoden aus dem Stand der Forschung und ihre Implementierungen zur Detektion von Kanus und Ruderbooten in Zeilenkamera-Bildern. Hierzu sollen geeignete Ansätze identifiziert, exemplarisch auf dem Deep Learning-Server des Fachbereiches mit den Kanudaten trainiert, evaluiert und mit den im Einsatz befindlichen Netzversionen verglichen werden. Eine Detektion auf der Zielplattform Jetson Nano ist optional, sollte aber berücksichtigt werden.
Schwerpunkte sind die Darstellung der Funktionsweise eines sinnvoll gewählten Modells, des Vorgehens beim Training, bei der Hyperparameteroptimierung und beim Vergleich mit den Vorgängermodellen. Eine wichtige nichtfunktionale Anforderung aus Sicht des Unternehmens ist die Verständlichkeit, Nachvollziehbarkeit und Wiederholbarkeit der Arbeit.

Kolloqium: 18.02.2022
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr.-Ing. Jochen Heinsohn, Dipl.-Inform. (FH) Daniel Schulz (IMAS Startanlagen und Maschinenbau)
Download: A1-Poster
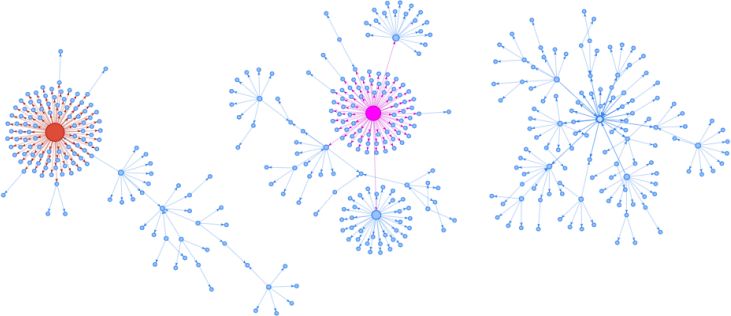
Auf der Seite thingiverse.com können Nutzer Open-Source-Lizensierte 3D-Druckvorlagen hochladen, zum Benutzen herunterladen und verändern. Daraus lässt sich ein Netzwerk mit verschiedenen Knotentypen konstruieren:
Aufgabe ist, einen vorhandenen Datensatz in geeigneter Form abzulegen und so zu erweitern, dass die vielschichtigen Relationen zwischen Nutzern, Designs, Makes etc. gut abgebildet werden. Diese Relationen sollen anschließend mittels Netzwerkanalyse ausgewertet und visualisiert werden. Dabei können Studien zur Open-Source-Softwareentwicklung als Vorbild dienen, denn auch hier gibt es Versionsmanagement und soziale Interaktionen (etwa über Bug-Reports und Foren). Abschließend sollen Lead-User identifiziert werden, die besonders aktiv und daher interessant für Unternehmen sind.

Kolloqium: 30.11.2021
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr.-Ing. Jochen Heinsohn, Dr. Sebastian Krause (IdeaLab.Systems)
Download: A1-Poster

Ziel der Arbeit ist die Untersuchung von Methoden des maschinellen Lernens zur Prognose von Qualitätsmaßen bei der Produktion von Spritzgussteilen. Die Arbeit ist eine erste Arbeit in diesem Kontext im Unternehmen und übernimmt somit eine Pilotfunktion. Das umfasst den kompletten Data Mining-Prozess von der Datenerfassung, -bereinigung, -aggregation, -vorverarbeitung und -exploration, der Definition geeigneter Gütemaße, Entwicklung eines Evaluationskonzeptes, über das Erstellen, Bewerten und Optimieren von Modellen, bis hin zur Modellselektion und nachhaltigen Dokumentation. Schwerpunkt ist das exemplarische Absolvieren aller notwendigen Schritte bis zu einem Modellvorschlag mit prognostizierter Güte.
Hierzu sind geeignete Anforderungen zu formulieren und ein sinnvoller Evaluationsprozess umzusetzen, der die erwartete Leistung der Regressoren bestimmt. Eine wichtige nichtfunktionale Anforderung aus Sicht des Unternehmens ist die Verständlichkeit, Nachvollziehbarkeit und Wiederholbarkeit der Arbeit.

Kolloqium: 28.10.2021
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr. Jochen Heinsohn, Dipl.-Ing. Stefan Lehmann (Kunststoff-Zentrum in Leipzig gGmbH)
Download: A1-Poster, Abschlussarbeit

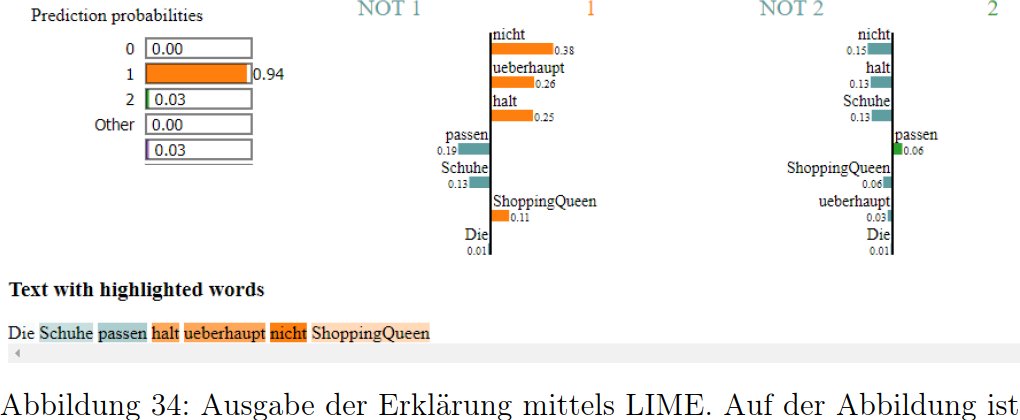
Ziel dieser Arbeit war die Untersuchung von Methoden des maschinellen Lernens für die Klassifizierung bzw. Distinktion von Fake News und echten Nachrichtenmeldungen. Einen besonderen Aspekt nimmt dabei der Faktor Transparenz ein. Untersucht wurden drei tiefe neuronale Netze und ein Modell basierend auf der logistischen Regression, sowie die Generierung von Erklärungen post-hoc mittels LIME. Die Untersuchungen wurden für drei verschiedene Datensätze vorgenommen.
Die Ergebnisse zeigen, dass die Genauigkeit der Modelle stark von dem zugrundeliegenden Datensatz abhängt. Mittels LIME konnten Erklärungen dafür gefunden werden. So finden sich in einem Datensatz Wörter, die immer in der Klasse „echte Nachrichtenmeldung“ zu finden sind. Die Modelle haben gelernt, dass es diesen Zusammenhang gibt und die Artikel anhand dieser Eigenschaften sortiert. Folglich konnten dadurch keine robusten Eigenschaften zur Unterscheidung der Klassen gelernt werden.

Kolloqium: 02.08.2021
Gutachter: Prof. Dr. Sven Buchholz, Dipl.-Inform. Ingo Boersch
Download: A1-Poster
Die Arbeit untersucht das Deployment vortrainierter Detektoren zur Erkennung von Boundingboxen und pixelgenauen Instanzen auf die Plattform Jetson Nano. Hierzu sind geeignete vortrainierte Netze zu evaluieren, weiter zu trainieren und optimiert auf dem Zielsystem auszuführen. Die Optimierung kann auf dem Trainingsserver oder auf dem Zielsystem stattfinden. Die Detektoren sollen in allen drei Phasen durch sinnvolle Metriken auf einer selbstgewählten Datenmenge evaluiert werden. Die lauffähige Umsetzung eines selbst trainierten Detektors auf dem Jetson Nano ist durch eine einfache Rahmenapplikation mit dem Deepstream SDK im Funktionsnachweis zu demonstrieren. Die besondere Schwierigkeit besteht in der Vielzahl beteiligter Frameworks, wie bspw. DeepStream, Triton, CUDA, gsstreamer, TensorFlow, TensorRT, Django, WSGI, Kafka und anderen sowie der Anwendung fortgeschrittener Modelle des Deep-Learnings, wie YOLO, SSD und Mask R-CNN.
Im Ergebnis konnten die Netze erfolgreich auf dem Deep-Learning-Server der Hochschule weitertrainiert und in verschiedenen Kriterien mit den Originalen verglichen werden. Die Optimierung erfolgte auf dem Trainingsserver und zeigte nur wenig Verbesserungen, beim Deployment auf das eingebettete Systeme wurden verschiedene Probleme mit TensorRT (TF-TRT) festgestellt. Die Rahmenapplikation auf dem Jetson Nano demonstriert ein lokales SSD zur Objektdetektion der COCO-Klassen, dessen Ergebnisse über RTSP- und Kafka bereitgestellt werden.

Kolloqium: 13.04.2021
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr. Sven Buchholz
Download: A1-Poster
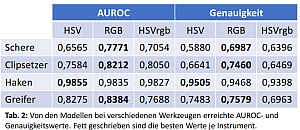
Ziel der Arbeit ist die Untersuchung des Einflusses verschiedener Kodierungen der Farbinformation bei der Klassifikation medizinscher Bilder mit Deep Learning-Modellen. Die Bilder stammen aus einem Operationsszenario der Gallenblasenentfernung und zeigen einzelne oder mehrere Operationswerkzeuge im Körper bei minimalinvasiver Chirurgie. Hierzu sind die Kodierungen zu bestimmen, die Datenmenge vorzuverarbeiten, geeignete Pipelines zur Modellentwicklung und -evaluation zu realisieren und die Ergebnisse auszuwerten. Die besondere Schwierigkeit besteht in der Größe der Datenmenge, der Einarbeitung in das Gebiet der Bildklassifikation mit Convolutional Neural Networks und dem korrekten Umsetzen eines sinnvollen Evaluierungskonzeptes.
Im Ergebnis entstand gelungene Modellierung der Bildklassen unter Berücksichtigung der Besonderheiten der Datenmenge. Die anschauliche Interpretation der Fehlklassifikationen deckte Probleme in der Grundwahrheit Cholec80 auf.

Kolloqium: 13.04.2021
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr. Jochen Heinsohn, Dr. rer. nat. Florian Aspart (caresyntax GmbH)
Download: A1-Poster, Abschlussarbeit

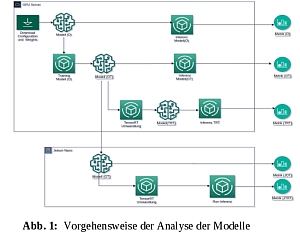
Genetische Algorithmen (GA) können zur Optimierung der Wichtungen künstlicher neuronaler Netze (kNN) verwendet werden. Die Lernaufgabe ist in diesem Fall das Finden einer Policy, die in der Lage ist, in einer einfachen simulierten Umgebung ein Fahrzeug zu steuern und gehört damit zum Reinforcement-Learning. Hierzu ist der GA zu implementieren und auf die Lernaufgabe anzuwenden. Die (physikbasierte) Simulation ist in geeigneter Weise in Unity zu entwickeln und soll Aspekte der Vermittlung von Konzepten berücksichtigen. Dies wäre denkbar durch die Visualisierung der Genotypen, der Fitnessverteilung oder der Fitnessentwicklung. Die besondere Schwierigkeit besteht in der Entwicklung einer Gesamtapplikation mit Simulation, Prozess-Steuerung, Visualisierung und KI-Komponente.
Im Ergebnis entstand eine anschauliche, motivierende Unity/C#-Applikation, die eine Population von neuronalen Netzen als Policy für die Steuerung der Fahrzeuge evolviert. Die Evolution kann mittels Fitnessverteilung und Fitnesskurven über die Generationen verfolgt werden. Die Verwandschaftsverhältnisse werden durch Farbcodes im Genotyp verdeutlicht. Trainierte Populationen können dann auf andere Strecken übertragen werden und zeigen dort eine ähnlich gute Leistung.
Kolloqium: 29.03.2021
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr. Jochen Heinsohn
Download: A1-Poster, Abschlussarbeit
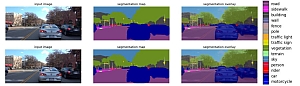
In den letzten Jahren hat die Edge-KI, d.h. die Übertragung der Intelligenz von der Cloud in Edge-Geräte wie Smartphones und eingebettete Systeme an großer Bedeutung gewonnen. Dies erfordert optimierte Modelle für maschinelles Lernen (ML), die auf Computern mit begrenzter Rechenleistung funktionieren können. Die Quantisierung ist eine der wesentlichen Techniken dieser Optimierung. Hierbei wird der Datentyp zur Darstellung der Parameter eines Modells verändert. In dieser Arbeit wurde die Quantisierung untersucht, insbesondere die Quantisierungstechniken nach dem Training, die in TensorFlow Lite (TFLite) verfügbar sind. Ein auf dem MNIST- Datensatz trainiertes Bildklassifizierungsmodell und ein auf dem Cityscapes-Datensatz trainiertes semantisches Segmentierungsmodell wurden für die Durchführung von Experimenten eingesetzt. Für das Benchmarking wurde die Inferenz auf zwei Hardware-unterschiedlichen CPU-Architekturen ausgeführt, und zwar auf einem Laptop und einem Raspberry Pi. Für das Benchmarking wurden Metriken wie Modellgröße, Genauigkeit, mittlere Schnittmenge über Vereinigung (mIOU) und Inferenzgeschwindigkeit gehandhabt. Sowohl für Bildklassifizierungs- als auch für semantische Segmentierungsmodelle zeigten die Ergebnisse eine erwartete Verringerung der Modellgröße, wenn verschiedene Quantisierungstechniken angewendet wurden. Genauigkeit und mIOU haben sich in beiden Fällen nicht wesentlich von der des Originalmodells geändert. In einigen Fällen führte die Anwendung der Quantisierung sogar zu einer Verbesserung der Genauigkeit. Dabei hat sich die Inferenzgeschwindigkeit bezüglich des Bildklassifizierungsmodells adäquat verbessert. In einigen Fällen erhöhte sich die Inferenzgeschwindigkeit auf Raspberry Pi sogar um den Faktor 10.

Kolloqium: 02.03.2021
Betreuer: Prof. Dr.-Ing. Jochen Heinsohn, Abhishek Saurabh (MSc) Volkswagen Car.Software Organization, Dipl. Inform. Ingo Boersch
Download: A1-Poster, Bachelorarbeit
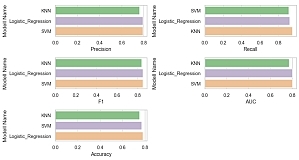
Die Kreditwürdigkeitsprüfung ist ein wichtiger Schritt, der von Kreditvergabestellen durchgeführt wird und der darüber entscheiden kann, ob das Bankinstitut potenziellen Kreditnehmern einen Kredit gewährt oder nicht. Diese Prüfung hat einen großen Einfluss auf Agenturen, insbesondere im Finanzsektor. Um finanzielle Probleme zu vermeiden, die aufgrund von Risiken bei der Kreditvergabe auftreten, wird eine Methode benötigt, die die Kreditwürdigkeitsprüfung unterstützt, indem die statistische Leistung eines Kreditscoring-Modells erhöht wird. Mit Hilfe von maschinellen Lernmodellen können Zeit, Aufwand und Kosten für die Durchführung statistischer Analysen, die auf Big Data angewendet werden, reduziert werden. Aus diesem Grund werden in dieser Arbeit Algorithmen des maschinellen Lernens, namentlich von Logistic Regression, K-Nearest Neighbors und Support Vector Machine, verglichen. Ferner werden Experimente durchgeführt, die die Leistung dieser Modelle verbessern können.
Kolloqium: 11.02.2021
Betreuer: Prof. Dr. Jochen Heinsohn, Dipl.-Inform. Ingo Boersch
Download: A1-Poster
Bayessche Netze (BN) sind gut zur Modellierung von Unsicherheit geeignet. Ein aktuelles Beispiel für das Auftreten von Unsicherheit ist die COVID-19 Domäne, insbesondere die Zusammenhänge zwi- schen u.a. Symptomen, Analysen, Auswirkungen und Folgen. Nach einer kurzen Einführung in die Grundlagen der BN sollen die we- sentlichen Konzepte der COVID-19 Domäne einschließlich ihrer Zu- sammenhänge dargestellt werden. Eine Analyse zum Stand der Forschung zu BN, die genau diese Domäne bereits als Anwendung haben, schließt sich an, ebenfalls eine eigene kurze Bewertung. Kern der Bachelorarbeit ist eine eigene Umsetzung mit Hilfe des HUGIN-Tools.
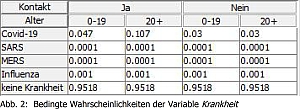
Die entstandene Anwendung ermöglicht es, die Wahrscheinlichkeit einer Erkrankung an COVID-19, SARS, MERS oder Influenza zu bestimmen. Dafür werden die beobachteten Symptome dem Netz als Evidenz bekannt gemacht. Das heißt, der Wert der entsprechenden Variable wird festgelegt und ist nicht mehr abhängig von der ursprünglichen Wahrscheinlichkeit. Es lässt sich zeigen, dass spezifische Symptome, wie die Störung des Geschmacks und/oder Geruchssinns, die A- posteriori-Wahrscheinlichkeiten der Krankheiten stärker beeinflussen als häufige Symptome wie Husten.
Kolloqium: 11.02.2021
Betreuer: Prof. Dr. Jochen Heinsohn, Dipl.-Inform. Ingo Boersch
Download: A1-Poster
Das Schiebepuzzle ist ein bekanntes Beispiel zur Aktionsplanung. Das Puzzle besteht aus einem 3x3-Feld in dem 8 Plättchen in einer Stellung angeordnet sind. Die Plättchen können horizontal oder vertikal in Richtung auf die freie Stelle bewegt werden. Die Aufgabe besteht darin, in der Ausgangsstellung die Plättchen sukzessive solange zu verschieben, bis die Zielstellung erreicht wird. In jeder Stellung gibt es mindestens zwei und höchstens vier Schiebemöglichkeiten. Wenn wir von durchschnittlich drei Möglichkeiten ausgehen, so ergibt dies einen Suchbaum der Verzweigungsrate 3. Bei einem typischen Lösungsweg der Länge 20 ergibt dies eine Gesamtmenge von 3^20, also etwa 3,5 Milliarden Knoten in der untersten Ebene des Suchbaumes. Dies ist mit reiner Tiefensuche oder Breitensuche nicht mehr zu bewältigen - oder vielleicht doch? PS: Sie haben 7000 Byte Speicher für Ihre Datenstrukturen.

Konstruieren Sie mit dem AKSEN-Board ein autonomes System (Roboter), das eine 3x3-Version des Schiebepuzzles repräsentiert und dieses lösen kann. Das Puzzle sollte dabei stets gut sichtbar sein, so dass alle Zwischenstellungen des Lösungsvorgangs gut wahrgenommen werden können. Eine Anzeige auf dem LCD-Display reicht nicht aus. Die Stellung soll mechanisch visualisiert werden, idealerweise mit tatsächlichen Puzzleteilen.
Und natürlich muss ein Robotersystem mit Stromversorgung, Motoren, Getrieben, geeigneten Sensoren und das Puzzle gebaut werden. Falls die Probleme zu groß werden (und groß werden sie auf jeden Fall), besteht die Fallback-Möglichkeit beim Abschlusswettbewerb mit einem manuellen Plan zu starten.
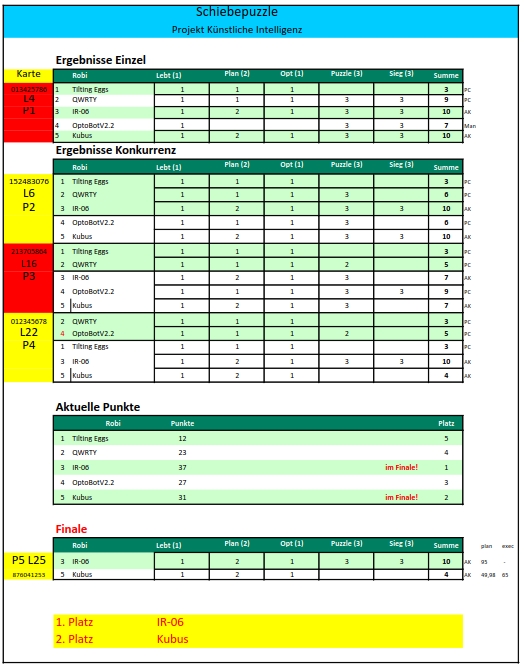
Es traten 5 Roboter zum Wettbewerb an: Tilting Eggs, QWRTY, IR-06, OptoBotV2.2 und Kubus. Das Finale IR-06 (37 Punkte) gegen Kubus (31 Punkte) gewann fehlerlos IR-06.
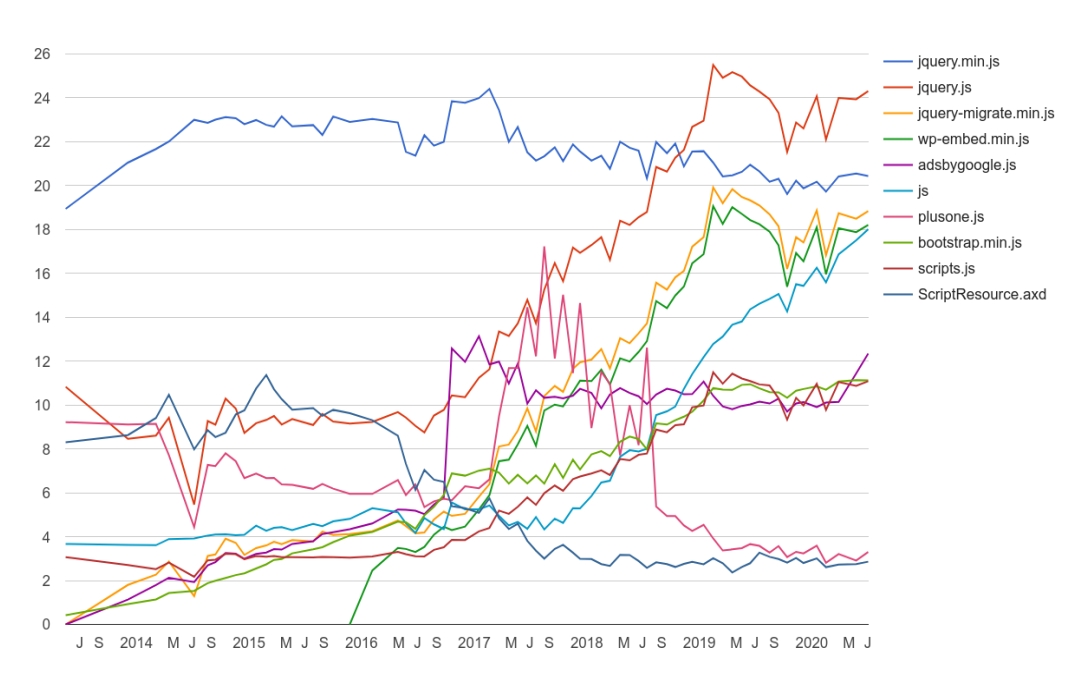
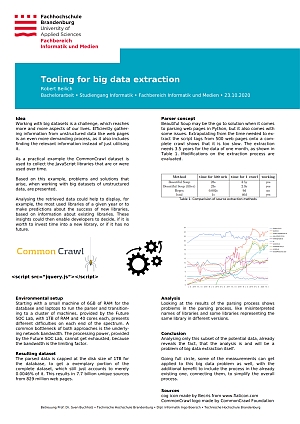
Diese Arbeit stellt Probleme und Lösungen vor, die auftreten können, wenn mit großen unstrukturierten Datensätzen gearbeitet wird. Dies erfolgt am Praxisbeispiel, die über die Zeit verwendeten JavaScript-Bibliotheken aus dem CommonCrawl-Datensatz zu extrahieren. Beginnend mit wenigen Hardware-Ressourcen und dem späteren Einsatz der stärkeren Infrastruktur des Future SOC Labs werden die verschiedenen Probleme, die diese Entwicklungsstadien mit sich bringen, behandelt, bspw. knappe Ressourcen zum Betreiben der Datenbank und die Hardwarekonfiguration. Abschließend werden die gesammelten Erkenntnisse anhand eines Teils des Datensatzes für das Praxisbeispiel umgesetzt und die Ergebnisse visualisiert. Die Einschränkung auf nur einen Teil des Datensatzes resultiert daraus, dass mit der vorhandenen Hardware der komplette Datensatz nicht bearbeitet werden kann.
Kolloqium: 23.10.2020
Betreuer: Prof. Dr. Sven Buchholz, Dipl. Inform. Ingo Boersch
Download: A1-Poster

Ziel der Arbeit sind erste Schritte zur Erweiterung einer Angebotsplattform für Leasingverträge um ein Vorschlagssystem. Das bisherige System benutzt einen sog. Dienstwagenrechner (DWR), um die monatliche Kostenbelastung für vom Nutzer einzugebende Vertragsdaten zu berechnen. Die Berech-nung ist zeitaufwändig. Durch eine Beschleunigung des DWR könnte die Zielgröße schon bei teilweise eingegebenen Vertragsdaten für eine Vielzahl von Optionen, bspw. Fahrzeugtypen, berechnet wer-den und somit als Grundlage für einen Vorschlag eines Vertragsmerkmals dienen. Diese Arbeit ver-sucht das Ziel durch eine datenbasierte Approximation des DWR zu erreichen. Die Hauptziele der Arbeit sind somit:

Eine Schwierigkeit der Aufgabe besteht in der Einbettung in einen realen Unternehmenskontext, sowie in der besonderen Situation der COVID-Pandemie.
Kolloqium: 09.07.2020
Betreuer: Dipl. Inform. Ingo Boersch, Prof. Dr. Susanne Busse
Download: A1-Poster

Eine erfolgreiche Kombination von Imitation Learning (IL) und Reinforcement Learning (RL) zur Bewegungssteuerung eines Roboters besitzt das Potenzial, einem Endnutzer ohne Programmierkenntnisse einen intelligenten Roboter zu Verfügung zu stellen, der in der Lage ist, die benötigten motorischen Fähigkeiten von den Menschen zu erlernen und sie angesichts der aktuellen Rahmenbedingungen und Ziele eigenständig anzupassen. In dieser Masterarbeit wird eine Kombination von IL und RL zur Bewegungssteuerung des humanoiden Roboter NAO eingesetzt. Der Lernprozess findet auf dem realen Roboter ohne das vorherige Training in einer Simulation statt. Die Grundlage für das Lernen stellen kinästhetische Demonstrationen eines Experten sowie die eigene Erfahrung des Agenten, die er durch die Interaktion mit der Umgebung sammelt.
Das verwendete Lernverfahren basiert auf den Algorithmen Deep Deterministic Policy Gradient from Demonstration(DDPGfD) und Twin Delayed Policy Gradient (TD3) und wird in einer Fallstudie, dem Spiel Ball-in- a-Cup, evaluiert. Die Ergebnisse zeigen, dass der umgesetzte Algorithmus ein effizientes Lernen ermöglicht. Vortrainiert mit den Daten aus Demonstrationen, fängt der Roboter die Interaktion mit der Umgebung mit einer suboptimalen Strategie an, die er im Laufe des Trainings schnell verbessert. Die Leistung des Algorithmus ist jedoch stark von der Konfiguration der Hyperparameter abhängig. In zukünftigen Arbeiten soll für das Ball-in- a-Cup-Spiel eine Simulation erstellt werden, in der die Hyperparameter und die möglichen Verbesserungen des Lernverfahrens vor dem Training mit dem realen Roboter evaluiert werden können.

Kolloqium: 22.01.2020
Gutachter: Dipl.-Inform. Ingo Boersch, Prof. Dr.-Ing. Jochen Heinsohn
Download: A1-Poster, Masterarbeit

Interessante Schlagzeugrhythmen zu finden ist eine kreativ anspruchsvolle Aufgabe. Es gibt die Möglichkeiten verschiedene Instrumente zu verschiedenen Zeitpunkten zu spielen. Die Anordnung der zu spielenden Instrumente in einem Zeitverlauf muss dabei wiederholbar sein und dem Schlagzeuger gefallen. Zur Unterstützung bei diesem Prozess werden interaktive evolutionäre Algorithmen vor- geschlagen. Durch die Interaktivität kann der Nutzer die Suche steuern und die Abwand- lungsoperatoren des evolutionären Algorithmus erzeugen neue Vorschläge. Ein Schwerpunkt dieser Arbeit liegt auf der Benutzeroberfläche. Diese soll die Ermüdung des Nutzers gering halten und auch zur Nachvollziehbarkeit des evolutionären Algorithmus beitragen. Theoretische Grundlagen werden erläutert, inspirierende Arbeiten betrachtet, die Konzep- tion und Umsetzung eines Demonstrationsprogramms beschrieben und Versuche mit dem Programm dokumentiert und ausgewertet.
Evolutionäre Algorithmen sind Optimierungsverfahren, die von der Evolution von Lebewesen inspiriert sind. Es werden Lösungsvorschläge (Individuen) erzeugt, die eine Bewertung (Fitness) zugeordnet bekommen, auf deren Grundlage eine Auswahl (Selektion) stattfindet welche Individuen zur Erzeugung der nächsten Individuen genommen werden. Die Kodierung eines Individuums ist der Genotyp, die Erscheinungsform des Individuums ist der Phänotyp. Wenn es eine Mensch-Maschine-Schnittstelle gibt, dann handelt es sich um einen interaktiven evolutionären Algorithmus nach der erweiterten Definition aus [Tak01]. Die Inklusion des Menschen in den Prozess stellt den Schwachpunkt dieser Vorgehensweise dar, da Menschen durch gleichbleibende Tätigkeiten schnell ermüden. Außerdem stellt das Vergleichen mehrerer zeitsequenzieller Individuen eine besondere kognitive Belastung des Nutzers dar.
[Tak01] Takagi, H.: Interactive evolutionary computation: fusion of the capabilities of EC optimization and human evaluation. In: Proceedings of the IEEE 89 (2001), Nr. 9. http://dx.doi.org/10.1109/5.949485. – DOI 10.1109/5.949485
Kolloqium: 29.10.2019

Gutachter: Dipl.-Inform. Ingo Boersch, Prof. Dr. Martin Christof Kindsmüller
Download: A1-Poster, Masterarbeit

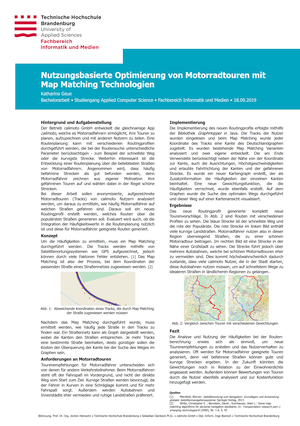
Bei dieser Arbeit sollen anonymisierte, aufgezeichnete Motorradtouren (Tracks) von calimoto Nutzern analysiert werden, um daraus zu ermitteln, wie häufig Motorradfahrer auf welchen Straßen gefahren sind. Daraus soll ein neues Routingprofil erstellt werden, welches Routen über die populärsten Straßen generieren soll. Evaluiert wird auch, ob die Integration der Häufigkeitswerte in die Routenplanung nützlich ist und diese für Motorradfahrer geeignete Routen generiert.
Kolloqium: 18.09.2019
Betreuer: Prof. Dr.-Ing. Jochen Heinsohn, Sebastian Dambeck M.Sc. (calimoto GmbH), Dipl.-Inform. Ingo Boersch
Download: A1-Poster
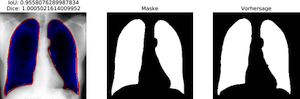
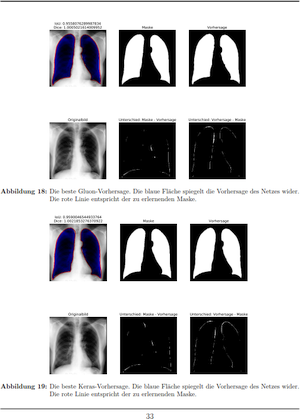
Die Arbeit untersucht exemplarisch die Leistzungsfähigkeit und Anwendbarkeit von GluonCV (Frameworks zur vereinfachten Verwendung tiefer neuronaler Netze) exemplarisch zur semantischen Segmentierung medizinischer Bilddaten mit einem U-Net. Hierzu wird angelehnt an die U-Net-Architektur [RFB15] eine vorhandene Keras-Implementierung [Pet18] in GluonCV reimplimentiert und in systematischen Versuchen verschiedene Kriterien zu Umsetzbarkeit und Performance evaluiert.
[RFB15] Ronneberger, Olaf ; Fischer, Philipp ; Brox, Thomas: U-Net: Convolutional Networks for Biomedical Image Segmentation. In: CoRR (2015).
[Pet18] Petsiuk, Vitali: Lung Segmentation (2D). (Dezember 2018). https://github.com/imlab-uiip/lung-segmentation-2d, Abruf: 05.07.2019.
Kolloqium: 05.09.2019
Gutachter: Prof. Dr. Sven Buchholz, Dipl.-Inform. Ingo Boersch

Ziel dieser Arbeit ist die Untersuchung von Ansätzen zur Stimmungsanalyse von Tweets in deutscher Sprache. Hierzu ist ein Data Mining-Prozess zu durchlaufen mit den Phasen Datenselektion, -exploration, - vorbereitung, Merkmalsgenerierung, Modellierung und Evaluation. Die besondere Schwierigkeit besteht in der Datenbeschaffung, den unstrukturierten Daten (Tweets) sowie der Auswahl und lauffähigen Umsetzung der Lernalgorithmen aus dem Bereich des Deep Learnings. Die Klassifizierer sollen mit ihren Hyperparametern nachvollziehbar dokumentiert und geeignet evaluiert werden.

Kolloqium: 29.03.2019
Betreuer: Prof. Dr. Sven Buchholz, Dipl.-Inform. Ingo Boersch
Download: A1-Poster, Masterarbeit

Beim Erlernen des Klavierspielens kann es besonders für Neueinsteiger problematisch sein, einen guten Fingersatz zu finden. Das Ziel dieser Arbeit ist, ein Programm zu erstellen, das den Fingersatz für Klavierpartituren generieren kann.
Diese Aufgabe wurde über die letzten 20 Jahre mehrfach versucht zu lösen. Die Lösungsansätze basieren meist auf der gleichen Idee und funktionieren nur bei einfachen Klavierstücken. In dieser Arbeit wurde deswegen mit einem anderen Lösungsansatz (Machine-Learning) gearbeitet. Es wurde eine Applikation zur Erzeugung von Fingersatz aus Partituren mit dem aktuellen Verfahren der bidirektionalen LSTM-Netze konzipiert und erfolgreich umgesetzt.
Die besondere Schwierigkeit lag in der Komplexität des gewählten Anwendungsszenarios und den aufwändigen Tests zur Evaluation der Performanz. Aufwändig deshalb, da es zu einer Partitur mehrere gut spielbare Fingersätze geben kann, so dass die automatisch erzeugten Fingersätze durch tatsächliches Spielen bewertet werden müssen.

Kolloqium: 28.09.2018
Betreuer: Prof. Dr. rer. nat. Martin Christof Kindsmüller, Dipl.-Inform. Ingo Boersch
Download: A1-Poster
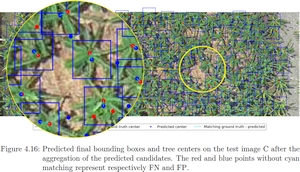
Die Arbeit bearbeitet ein schwieriges Problem bei der automatisierten Überwachung von Pflanzenzuständen auf Bauernhöfen und Plantagen. Sie schlägt eine auf Deep Learning basierende Methode vor, um Bananenbäume auf einer Bananenplantage mittels Drohnenbildern automatisch zu detektieren und zu zählen. Die Schwierigkeit dieser Aufgabe besteht darin, dass sich Bananenbaumkronen sehr oft überlappen. Selbst für einen Menschen ist diese Aufgabe sehr schwierig zu erledigen. Die Aufgabe zerfällt damit in zwei Teile: Lokalisierung (Detektion) und Zählung.
Zur Lösung dieses Problems wird ein mehrstufiger Ansatz verwendet: ein Klassifikator erkennt, ob eine ROI eine Bananenbaumkrone enthält, ein folgender Regressor bestimmt die Koordinaten der Kronenkandidaten in der ROI. Eine abschließende Aggregation fasst die Baumkronenkandidaten zu erkannten Baumzentren zusammen. Diese sind zum Schluss die gesuchten Baumkronen. Die entwickelte Methode wird auf einem Testfall mit vielversprechenden Ergebnissen evaluiert. Auf diesem Testfall, wo dicht gepflanzte Bäume stehen, erreicht das Modell ein Margin- Of-Error von 0.0821. Dies entspricht einer Güte von 91.79% bei der Zählungsaufgabe. Hervorzuheben ist der geringe durchschnittliche Abstandsfehler von etwa 43 cm bei der Lokalisierungsaufgabe.

Kolloqium: 24.09.2018
Betreuer: Prof. Dr.-Ing. Sven Buchholz, Dipl.-Inform. Ingo Boersch, Jan Vogt (Orca Geo Services GmbH, Brandenburg)
Download: A1-Poster
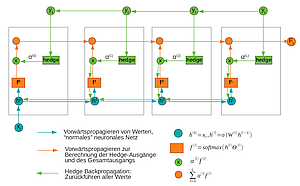
Das Ziel der Arbeit ist die Untersuchung der Eignung von Hedge-Backpropagation zur Vorhersage von Maschinenausfällen auf dem Turbofan-Datensatz. Hedge-Backpropagation ist ein Multilayerperzeptron, bei dem aus jeder versteckten Schicht eine zusätzliche Ausgabe erzeugt wird. Die Ausgaben werden linear gewichtet und ihre Wichtung mit dem Hedge-Algorithmus alternierend zum übrigen Netz angepasst. So soll es möglich sein, dass sich über diese Wichtungen die genutzte Tiefe des Netzes selbständig an die Aufgabe anpasst.
Der Ansatz soll detailliert vorgestellt und entweder selbst oder unter Zuhilfenahme einer geeignet gewählten Implementierung umgesetzt und mit anderen Ansätzen, bspw. LSTM-Netzen nach sinnvoll gewählten Kriterien verglichen werden.

Kolloqium: 06.08.2018
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr.-Ing. Sven Buchholz, Prof. Dr. rer. nat. Adrian Paschke (Fraunhofer FOKUS)
Download: A1-Poster
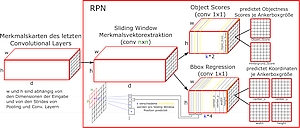
Ziel der Arbeit ist die Untersuchung der Leistungsfähigkeit aktueller künstlicher neuronaler Netze zur Objektdetektion in Bildern. Hierzu sind einführend wesentliche Konzepte des Deep Learnings zu erläutern. Der Schwerpunkt der Arbeit besteht in der Evaluation regionsbasierter Objektdetektionssysteme. Hierzu soll die Funktionsweise mehrstufiger regionsbasierter Detektionssysteme, insbesondere von R-CNN, Fast-RCNN und Faster-RCNN, detailliert erläutert und verglichen werden. Die Netze sind zu implementieren und auf geeigneten Daten, bspw. den VOC-Datenmengen, zu trainieren und der Einfluss von Hyperparametern auf Rechenzeiten und Performance zu untersuchen. Die Evaluationsszenarien und Performancekriterien sind geeignet zu wählen.

Kolloqium: 11.07.2018
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr. Sven Buchholz
Download: A1-Poster, Masterarbeit
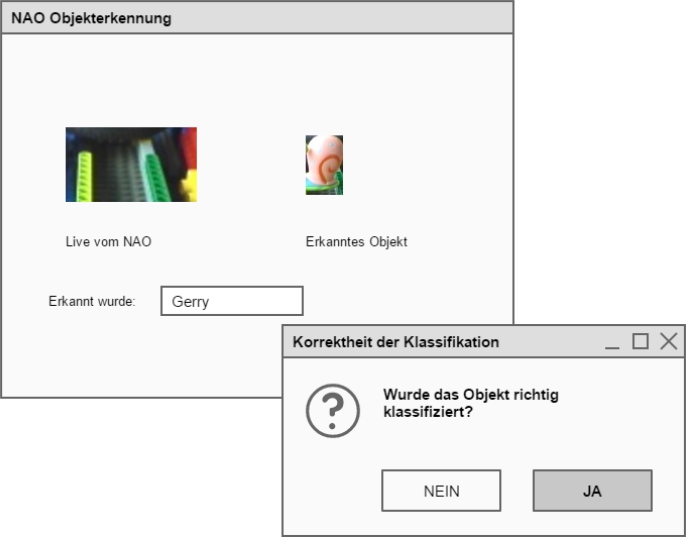
Ziel der Arbeit ist die Entwicklung einer Applikation zur Demonstration der Interaktion einer Person mit einem Roboter zum Erlernen von Objekten, die später wiedererkannt werden sollen. Der Schwerpunkt liegt zum einen auf der Entwicklung des Interaktionsmodells und zum anderen auf einer zuverlässigen Erkennung nach wenigen Lernbeispielen. Die besondere Schwierigkeit liegt in der Verwendung des NAO-Roboters. Die Arbeit soll die Vorarbeiten berücksichtigen und diese weiterentwickeln.
Im Ergebnis entstand eine Python-Applikation, die im Dialog mit einem Menschen in der Lage ist, Objekte zu labeln und wiederzuerkennen. Eine kreative Lösung stellt die robuste Eingabe des Labels über Stempel und Zeichenerkennung dar. Das Wiedererkennen wird durch Segemntierung und Klassifikation gelöst. Die Segmentierung erfolgt pragmatisch anhand eines initialen Hintergrundes, für die Klassifikation werden SIFT-Features als Objektmerkmale extrahiert und damit eine RBF-SVM trainiert.

Kolloqium: 07.03.2018
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr. Jochen Heinsohn
Download: A1-Poster
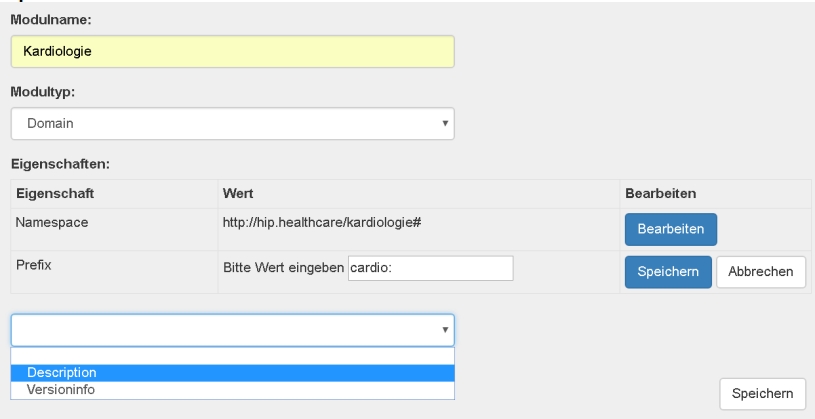
Die Aufgabenstellung besteht darin, die Modularisierung von Ontologien entsprechend medizinischer Fachbereiche zu unterstützen. Dazu soll eine prototypische Webanwendung für die Health Intelligence Platform (HIP) der ORTEC Gesellschaft für Organisations- und Technologieberatung mbH konzeptioniert und entwickelt werden, mit deren Hilfe die Verwaltung und das Erstellen der Module erleichtert und verbessert wird. Ein sehr wichtiger Punkt ist die Veränderung des Importierens von Konzepten oder auch die Referenzierung zwischen Modulen. Grundsätzlich ist erwünscht, dass aufgezeigt wird, wie flexible Module kombiniert oder als Quellen für andere Module verwendet werden können.

Kolloqium: 07.03.2018
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr.-Ing. Jochen Heinsohn, Dr. med. Christian Seebode (ORTEC Gesellschaft für Organisations- und Technologieberatung mbH)
Download: A1-Poster
Ziel der Arbeit ist die Entwicklung einer Applikation zur Demonstration von Reinforcement- Lernen (RL) auf autonomen, humanoiden Robotern. Demonstriert werden soll das Erlernen einer erfolg- reichen Handlungsstrategie in einem einfachen realen Szenario. Das Szenario kann selbst gewählt werden, bspw. das Sortieren von Bällen. Das Szenario soll im Wesentlichen deterministisch, kann aber in seltenen Fällen stochastisch reagieren. Der Lernvorgang soll unbeaufsichtigt selbständig laufen können und in kurzer Zeit (bspw. einer Stunde) zu einer erfolgreichen Policy führen.
Ein zweiter Applikationsmodus soll das unbegrenzte Ausführen der erlernten Policy ermöglichen. Für den Lernvorgang darf der Agent keine fremderstellte Simulation verwenden, für Evaluierung und Test der Applikation ist eine Simulation natürlich erlaubt. Damit besteht die zweite Schwierigkeit in der geringen Anzahl von Interaktionen mit dem realen Szenario, so dass Maßnahmen zur Effizienzsteigerung klassischer RL-Ansätze verwendet werden müssen. Hilfreich wäre eine geeignete Visualisierung des Lernvorganges bzw. der Policy oder transparenter Wertefunktionen, um Besuchern und Studenten den Ablauf zu verdeutlichen und die Programm-Entwicklung zu unterstützen.

Kolloqium: 07.03.2018
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr. Jochen Heinsohn
Download: A1-Poster, Kolloquiumsvortrag, Masterarbeit
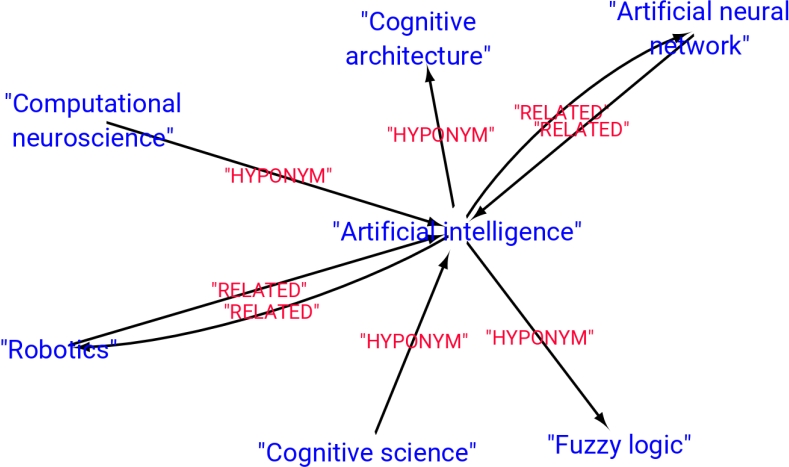
Ziel der Arbeit war die Entwicklung einer prototypischen Web-Anwendung mithilfe des R-Pakets "Shiny" von RStudio. Mit dieser Anwendung können Mitarbeiter der mapegy GmbH auch ohne tiefe technische Kenntnisse Datenbankinhalte kuratieren, die in der Form eines Thesaurus vorliegen. Darüber hinaus werden dem Nutzer der Web-Anwendung Themenvorschläge präsentiert, die dem Thesaurus hinzugefügt werden können.

Kolloqium: 02.02.2018
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr.-Ing. Jochen Heinsohn, Dr. rer. nat. Matthias Plaue (mapegy GmbH)
Download: A1-Poster

Colin Christ studiert seit 2012 Informatik an der TH Brandenburg. Den Bachelor schloss er mit dem Schwerpunkt „Intelligente Systeme“ ab. In seinem Masterprojekt vertiefte er das Thema "Reinforcement Learning (RL)" aus der Vorlesung "Künstliche Intelligenz". Reinforcement Learning ist ein Lernparadigma, das in der Robotik zunehmend Einsatz findet. Hierbei lernt ein Agent durch Ausprobieren eine genau auf seine Situation, bspw. seinen Körper und Sensorik, angepasste Handlungsstrategie. Neue Lernalgorithmen reduzieren die Anzahl notwendiger Interaktionen durch Übertragen erlebter Erfahrungen auf ähnliche Situationen und führen so zu einem verkürzten Lernvorgang. Mittlerweile scheint der Einsatz von RL in industriellen Umgebungen möglich.
Colin Christ behandelt in seiner Masterarbeit ein Szenario, in dem ein humanoider Roboter auf diese Weise vom Menschen definierte Ziele erreichen soll - ohne dass explizit programmiert wird, wie die Aufgabe gelöst werden kann: "Wünsch Dir was"-Programmierung.
Die Zwischenergebnisse präsentierte er kurzweilig und zur Diskussion anregend auf dem World Usability Day zum diesjährigen Thema "Artificial Intelligence" am 09.11.2017 im Infopanel "UX- und Design-Innovationen aus Brandenburg" in Berlin.



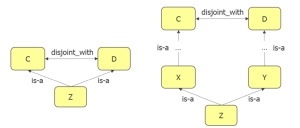
Ziel der Bachelorarbeit ist die Untersuchung einer medizinischen Ontologie (WNC-Ontologie*) im Hinblick auf Inkonsistenzen und die Entwicklung eines Algorithmus zur Reparatur von Inkonsistenzen. Hierzu wurden verschiedene Inkonsistenz-Dimensionen in der vorliegenden Ontologie analysiert und eine Gruppe von Inkonsistenzen definiert, für die eine Reparatur mit einem teilautomatischen Verfahren möglich ist. Dazu werden logisch widersprüchliche Bestandteile der Ontologie in einem Dialog mit dem Domänenexperten disambiguiert und anschließend korrekt modelliert.
*Die WNC-Ontologie wird von dem Berliner Unternehmen ID GmbH & Co. KGaA entwickelt. Sie bildet die in der Wingert-Terminologie dargestellten medizinischen Begriffe als Konzepte und die Zusammenhänge zwischen diesen Begriffen als Relationen ab und entstand als Ergebnis der Migration der Wissensrepräsentation aus einem semantischen Netz in eine moderne Ontologie basierend auf Beschreibungslogik.

Kolloqium: 21.09.2017
Betreuer: Prof. Dr.-Ing. Jochen Heinsohn, Dipl.-Inform. Ingo Boersch
Download: A1-Poster
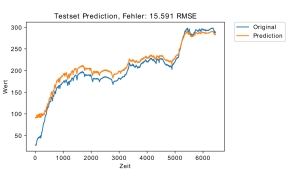
Ziel der Arbeit ist die Untersuchung, ob und wie gut sich LSTM-Netze zur Prognose von Motorsignalen eignen.
LSTM-Netze sind rekurrente künstliche neuronale Netze mit einem besonderen Neuronenmodell. Diese Netze eignen sich zur Prognose (Zeitreihen, Sprachverarbeitung) oder als Generator insbesondere dann, wenn sich die relevanten Informationen in weiter Vergangenheit befinden.
Die Arbeit untersucht das Verhalten der Netze auf künstlichen Zeitreihen und auf realen Signalen im Holdout-Verfahren. Verwendet wird das Deep Learning-Framework Keras auf TensorFlow, allerdings ohne GPU-Unterstützung.
Es konnte gezeigt werden, dass LSTM in der Lage sind, dynamische Motorprozesse zu erlernen und erfolgreiche Prognosen durchzuführen. Die Prognose mit LSTM lieferte in den untersuchten Fällen in diesem ersten Pilotprojekt ohne jede Optimierung ähnlich gute Ergebnisse, wie die bereits bei IAV etablierten Modelle, ist aber im Training deutlich aufwändiger.

Kolloqium: 21.09.2017
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr.-Ing. Jochen Heinsohn, Dipl.-Ing. Frank Beyer (IAV GmbH)
Download: A1-Poster

Ziel der Arbeit ist ein Softwarefilter zum Entfernen der Bewegungsunschärfe in Fotos, die durch Bewegen der Kamera während der Aufnahme entstanden ist. Diese Unschärfestörung lässt sich vereinfacht als Faltung des Bildes mit einem Bewegungs-Kernel und additivem Rauschen modellieren. Gelingt es den richtigen Kernel zu finden, so kann in einer Optimierungsaufgabe das ungestörte Bild restauriert werden.
Hierzu wir in Anlehnung an ein in [Xu10] publiziertes Verfahren ein eigener vereinfachter Algorithmus entwickelt, der sich iterativ durch Herausarbeiten der Original-Kanten und Optimierung einem geeigneten Kernel nähert. Das Filter wird als Softwareprototyp in Java implementiert und als Plugin in die Bildverarbeitungssoftware Fiji eingefügt. Das Plugin soll für die Restauration von Grauwertbildern verwendet werden. Die Qualität der Restaurationsergebnisse und die Laufzeit des entstandenen Filters werden in drei Testszenarien (zwei mit bekannten Kerneln, ein reales Bild) analysiert. Das Verfahren wurde erfolgreich evaluiert.
[Xu10] Li Xu, Jiaya Jia: Two-Phase Kernel Estimation for Robust Motion Deblurring. ECCV (1) 2010: 157-170

Kolloqium: 08.08.2017
Betreuer: Prof. Dr. sc. techn. Harald Loose, Dipl.-Inform. Ingo Boersch
Download: A1-Poster
Masterprojekt auf der NWK18: Der freie Wille eines Menschen ist eine urbane Hypothese und Inhalt angeregter Forschungstätigkeit. Dabei steht die Frage im Mittelpunkt, ob ein freier Wille existiert oder der Mensch durch das Unterbewusstsein gesteuert ist. Im Rahmen dieser Arbeit wird ein Experiment aus dem Bereich Mensch-Roboter-Interaktion entworfen und vorbereitet, das klären soll, ob der Mensch beim Versuch bewusst zufällig zu handeln, doch unbewusst in ein Muster verfällt. Die Voruntersuchung klärt kritische Probleme und begründet die Zuversicht in die Determiniertheit anhand der Prognose einer Zeitreihe menschlicher Aktionen.
Der Vortrag zur Publikation wird von Vanessa Vogel am 31. Mai 2017 an der Hochschule Mittweida gehalten.
Vogel, Vanessa ; Boersch, Ingo: Prognose des freien Willens - Machbarkeit und erste Ergebnisse. In: 18. Nachwuchswissenschaftlerkonferenz (NWK), Hochschule Mittweida, 2017 (Scientific Reports Nr. 1), S. 341-345. ISSN 1437-7624
Aufgrund des ständigen Wandels der Ressource Wissen müssen auch Wissensrepräsentationssysteme wie Ontologien jederzeit flexibel anpassbar sein. Häufige Änderungen im Zuge der Ontologieevolution sorgen allerdings für eine Erhöhung ihres Fehlerpotenzials, wodurch Probleme im Anwendungsbereich auftreten können. Um dies zu vermeiden, rückt das Thema der Qualitätssicherung in den Vordergrund.
Auch für die Ontologie in der Health Intelligence Platform (HIP) wird eine effiziente Möglichkeit benötigt, um an sie gestellte Qualitätskriterien überprüfen zu können. Aus Mangel an passenden öffentlichen Werkzeugen zeigt diese Arbeit die Konzeption und Umsetzung eines Ontologietest-Frameworks, welches an die Anforderungen der HIP angepasst ist und sowohl strukturelle als auch semantische Fehler aufdeckt.
Als Ergebnis der Arbeit ist eine über Maven erstellte Klassenbibliothek entstanden, die in Form eines Java Archives in HIP-Entwicklungsprojekte eingebunden werden kann, um auf der Grundlage des Frameworks Ontologietests zu implementieren. Zukünftig wird eine Weiterentwicklung des Frameworks dafür sorgen, die Testgenerierung und die Nutzung an sich weiter zu vereinfachen.
Kolloqium: 23.05.2017
Betreuer: Prof. Dr.-Ing. Jochen Heinsohn, Dr. med. Christian Seebode (Ortec medical GmbH), Dipl.-Inform. Ingo Boersch
Download: A1-Poster, Masterarbeit
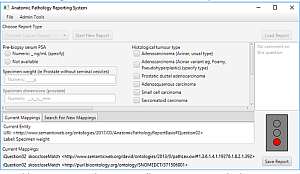
Diese Arbeit beschreibt einen Ansatz, nach dem pathologische Befundberichte strukturiert und vollständig erstellt werden können.
Die implementierte Software nutzt Vorlagen der ICCR (International Collaboration on Cancer Reporting), um ein formales Modell der drei Report-Typen zur Erstellung von Endometrium-, Haut- und Prostatakrebsbefundberichten zu erstellen. Bei den erzielten Dokument-Repräsentationen handelt es sich um Wissensbasen, welche in der Web Ontology Language (OWL) formuliert und somit nicht nur maschinenlesbar, sondern darüber hinaus maschinenverständlich sind. Durch die formal spezifizierte Semantik des entsprechenden Formats lassen sich die Berichte unter Verwendung des HermiT-Reasoners auf Vollständigkeit überprüfen. Des Weiteren wird die Verknüpfung der modellierten Report-Bestandteile zu externen medizinischen Wissensbasen wie SNOMED CT, NCIT und PathLex betrachtet.
Die Beschreibung des ontologiebasierten Verfahrens und die prototypische Implementierung des Softwaretools sollen eine mögliche Darstellungsform aufzeigen, nach der Befundberichte im Bereich der anatomischen Pathologie digital, dynamisch sowie durch vorgegebene Strukturelemente präzise und vollständig erstellt und verarbeitet werden können.

Kolloqium: 10.04.2017
Betreuer: Prof. Dr.-Ing. Jochen Heinsohn, Dipl.-Inform. Ingo Boersch
Download: A1-Poster, Masterarbeit
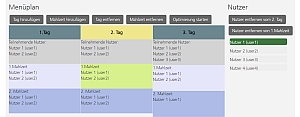
Ziel der Arbeit ist eine Applikation zur Menüplanung unter Verwendung ontologischen Wissens aus verschiedenen Quellen.
Ein Schwerpunkt ist die Auswahl und integrative Vernetzung geeigneter Wissensquellen in Form von Terminologien zur Beschreibung der Anforderungen an einen gewünschten Menüplan. Hierzu gehören beispielsweise Rezepte, Nährstoffangaben und diätische Restriktionen. Es soll der CTS2-Terminologieserver des Fraunhofer FOKUS verwendet werden.
Ein zweiter Schwerpunkt ist die Formalisierung des Planungsproblems sowie die Auswahl und lauffähige Umsetzung eines geeigneten Optimierungsverfahrens zur Mehrzieloptimierung. Hierbei ist der Stand der Technik einzubeziehen. Die Qualität der erstellten Pläne wird evaluiert.

Die Analyse, Konzeption und Umsetzung ermöglichen, dass aufbauend auf der Arbeit reale Planungsprobleme des Diskursbereiches gelöst werden können. Die Webapplikation läuft in einem aktuellen Browser und erlaubt in prototypischer Weise das Darstellen der Terminologien, die Eingabe des Planungsproblems, die Parametrierung der Planung und die Visualisierung der Ergebnisse. Die Schwierigkeit der Arbeit besteht in Komplexität und im Umfang der notwendig zu lösenden Teilaspekte.
Kolloqium: 24.03.2017
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr. rer. nat. Rolf Socher, in Kooperation mit dem Fraunhofer FOKUS
Download: A1-Poster, Masterarbeit

In dieser Arbeit werden in einem mit Drohnen aufgenommenen, orthorektifizierten Luftbild Bananenpflanzen detektiert und abschließend gezählt. Die Aufgabe fällt damit in das Gebiet der Mustererkennung und soll durch Ansätze des maschinellen Lernens in einem Data-Mining-Prozess gelöst werden. Die besondere Schwierigkeit besteht in der starken Überlappung der Bananenpflanzen im Bild, wodurch eine Segmentierung schwierig bis unmöglich wird. Ebenso kann bei einer entwickelten Plantage nicht mehr von einer gitterförmigen Anordnung der Pflanzen ausgegangen werden.
Ausgehend von einer Menge manuell annotierter Bananen-Templates werden Merkmale von Bildpunkten entwickelt,die es ermöglichen sollen, mit Hilfe von Supervised Learning die Zentren der Pflanzen von anderen Bildpunkten zu separieren. Es werden verschiedene Merkmale (Farbe, Textur, Gray-Level Co-Occurrence Matrix) und Lernalgorithmen systematisch untersucht.
Kolloqium: 27.02.2017
Betreuer: Prof. Dr.-Ing. Sven Buchholz , Dr. Frederik Jung-Rothenhäusler (ORCA Geo Services), Dipl.-Inform. Ingo Boersch
Download: A1-Poster

Ziel der Arbeit ist eine Untersuchung numerischer und strategischer Parameter bei der Anwendung von Autoencodern zur Erkennung von Anomalien in Bildern. Hierbei sind systematisch die Einflüsse verschiedener Einstellungen zu evaluieren und zu bewerten. Im Ergebnis soll eine Empfehlung zur Einstellung des Verfahrens bei der Detektion Malaria-infizierter Blutzellen vorgenommen werden. Die besondere Schwierigkeit der Arbeit besteht in der Umsetzung eines systematischen Suchprozesses in einem umfangreichen Parameterraum, der Arbeit mit realen Daten und dem aufwändigen Training.
Kolloqium: 14.10.2016
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr.-Ing. Sven Buchholz, Dr.-Ing. Christian Wojek (Carl Zeiss AG)

Download: A1-Poster

Ziel der Arbeit ist die Umsetzung eines einfachen regelbasierten Schwarms in einer Spiele-Engine. Hierzu sind die Eigenschaften eines Agenten, wie Bewegungsrichtung und -geschwindigkeit anhand der Eigenschaften benachbarter Schwarmmitglieder zu bestimmen. Die emergierenden Bewegungsmuster des Schwarms sollen in geeigneter Weise visualisiert werden.
Grundlage der Arbeit bildet das Flocking-Modell von C. Reynolds, in dem der Einfluss benachbarter Individuen als gewichtete Summe physikalischer Kräfte modelliert wird. Ein Agent richtet sich nach folgenden einfachen Regeln:
Die Darstellung erfolgt als eine Herde von Rehen, die zufällige Zielpunkte ansteuert und zeigt ein an die Natur angelehntes Schwarmverhalten.

Kolloqium: 29.09.2016
Betreuer: Prof. Dr.-Ing. Jochen Heinsohn, Dipl.-Inform. Ingo Boersch
Download: A1-Poster

Ziel der Arbeit ist die Entwicklung einer Applikation, die einem NAO-Roboter ermöglicht, autonom Tic- Tac-Toe gegen einen menschlichen Spieler zu spielen. Schwerpunkt ist hierbei ein natürliches und motivierendes Spielerlebnis. Hierzu ist es notwendig, robuste Lösungen für Teilprobleme der Interaktion wie Rezeption und Aktorik zu entwickeln, die diese Zielstellung berücksichtigen. Eine leistungsfähige Spielstrategie ist so umzusetzen, dass sowohl starke wie auch schwächere Spieler Freude an der Interaktion finden. Die Applikation soll autonom auf dem Roboter laufen und perspektivisch für andere Spiele sowie beim Spiel NAO gegen NAO einsetzbar sein. Die besondere Schwierigkeit der Arbeit liegt in der Gestaltung der Interaktion und dem Lösen der Robotik-Probleme in einer realen, stochastischen Welt.
Die Arbeit wurde in die Problemfelder Spiellogik, Strategie, Aktorik, Bildverarbeitung und Interaktion aufgeteilt. Spiellogik und Strategie beschäftigen sich mit der Umsetzung des grundlegenden Spielablaufs. Die Aktorik dient primär der Umsetzung des Zeichnens auf dem Spielfeld. In der Bildverarbeitung wird das Spielfeld mit Hilfe der Roboterkameras erfasst und ausgewertet. In der Interaktion wird eine auf Sprache basierende Schnittstelle mit dem menschlichen Gegenspieler sowie eine adaptive Spielstärke umgesetzt.
Kolloqium: 02.08.2016
Betreuer: Prof. Dr.-Ing. Jochen Heinsohn, Dipl.-Inform. Ingo Boersch
Download: A1-Poster

Ziel der Arbeit ist das Erstellen gültiger, transparenter, prädiktiver Modelle zur Vorhersage patientenorientierter Zielgrößen (poZg), wie bspw. dem Überleben von Brustkrebspatientinnen, aus den Daten des Tumorzentrums. Die Analyse dient insbesondere dem Aufzeigen bisher unbekannter Zusammenhänge, Einflussgrößen und Mustern, die zur Verbesserung des Behandlungsprozesses dienen können und mit Ärzten diskutiert werden können. Die Ergebnisse sind in ihrer Güte anhand der vorliegenden Daten geeignet zu bewerten und durch Fachexperten (Ärzte, TZBB) zu evaluieren.
Zugehörige Aufgabenstellungen sind unter anderem: Definition patientenorientierter Zielgrößen, deskriptive und explorative Analyse, Bestimmung relevanter Merkmale, Merkmalsdefinition, Modellbildung und Evaluierung.
Ein zweiter Schwerpunkt ist die geeignete patientenorientierte Visualisierung von Zusammenhängen, die bei Entscheidungen des Patienten hilfreich sein können. Besondere Schwierigkeiten der Arbeit sind die Umsetzung des Data Mining Prozesses mit realen, unvollständigen, fehlerbehafteten Daten und die Nutzung transparenter Modellierung und Visualisierung zum Erkenntnisgewinn für Fachexperten und zur Entscheidungsunterstützung für Patienten. Alle Softwaremodule sollen auf Wiederverwendbarkeit, auch durch Anwender beim TZBB, ausgelegt sein, vorzugsweise soll Python verwendet werden.
Kolloqium: 13.06.2016
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr.-Ing. Sven Buchholz
Download: A1-Poster

Masterstudent Patrick Rutter demonstrierte am 1. juni bei der Projektkonferenz der THB, die Fähgikeiten des von ihm programmierten NAO-Roboters beim TicTacToe-Spiel gegen Besucher. Mithilfe eines verlängerten Fingers setzt der NAO auf einen Touchscreen sein Feld und erkennt die Züge des Menschen. Während des Spieles versucht er zwar zu gewinnen, aber nicht demotivierend oft. Er adaptiert sich dazu an die Spielstärke des menschlichen Spielers und erzeugt so ein kurzweiliges Spielerlebnis.
Die Präsentation zeigt einen Zwischenstand der Masterarbeit.


Vom 19. bis 21. Mai trafen sich Professoren, Mitarbeiter und Studenten norddeutscher Fachhochschulen zum zwanglosen Austausch über Forschung und Lehre beim 21. Norddeutschen Kolloquium für Informatik an Fachhochschulen (NKIF 2016) an der HAW Hamburg. Für die TH Brandenburg stellte Franziska Krebs (Masterstudentin Informatik) ihre Zwischenergebnisse zum SmartMenu-Projekt vor, in dem eine Speiseplanung gestützt auf Ontologien und semantische Technologien vorgenommen wird.
Vortragsfolien: Aufbau eines Wissensnetzes für ein klinisches Speiseempfehlungssystem – ein Beispiel aus dem THB-Forschungs-/Projektstudium
Es wurden Kontakte geschlossen und aufgefrischt, gefachsimpelt und diskutiert.

Ziel der Arbeit ist Reflektion und Analyse der Therapieentscheidung im realen Behandlungsprozess des Mammakarzinoms. Dafür soll zunächst ein normatives Modell, welches aus der S3-Leitlinie (LL) gewonnen wird, mit den tatsächlichen Gegebenheiten, gegeben durch epidemiologische Daten des Tumorzentrums Land Brandenburg e.V., verglichen werden.
Zugehörige Fragestellungen sind hierbei: in wie weit wurde die LL eingehalten, wo gibt es Abweichungen, wie groß sind die Abweichungen. Anschließend sollen datenbasiert verschiedene Modelle und Visualisierungen mit Methoden des Data Minings erstellt werden. Diese sollen die reale Therapieentscheidung widerspiegeln. Wichtige Fragestellungen für die anschließende Reflektion und Analyse sind: wo gibt es Überschneidungen und Unterschiede zum LL-Modell, worauf lassen sich die Unterschiede zurückführen, gibt es andere Einflussfaktoren als in der Leitlinie verzeichnet.
Die besondere Schwierigkeit der Arbeit liegt in der Datenqualität und der komplizierten Anwendungsdomäne.
Kolloqium: 07.04.2016
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr. med. Eberhard Beck
Download: A1-Poster
 Sebastian Busse stellt seine Projektarbeit im Rahmen einer
Posterpräsentation vor. (Foto: Dennis Wagner)
Sebastian Busse stellt seine Projektarbeit im Rahmen einer
Posterpräsentation vor. (Foto: Dennis Wagner)
Im Masterprojekt "Künstliche Intelligenz" arbeitet Sebastian Busse an einem System zur Überprüfung von pathologischen Befundberichten auf inhaltliche Vollständigkeit mit Hilfe von terminologischem Wissen. Die erstellte Publikation [1] reichte er beim LOUHI*-Workshop 2015 in Lissabon ein. Der Workshop ist der Teil der EMNLP**-Konferenz.
„Congratulations, your submission has been accepted to appear at the conference.“
Der Fachbereiche Informatik und Medien (FBI) unterstützt Studenten bei Konferenzbeiträgen bei Reisekosten und Tagungsgebühr, um den Einstieg in den Konferenzbertireb zu fördern. So konnte Sebastian Busse seine Arbeit erfolgreich dem wissenschaftlichen Diskurs in Portugal stellen.
* Sixth Workshop on Health Text Mining and Information Analysis
** Conference on Empirical Methods in Natural Language Processing/
[1] Busse, S. Checking a structured pathology report for completeness of content using terminological knowledge. Proceedings of the Sixth International Workshop on Health Text Mining and Information Analysis. 2015 Sep; 103-108
Die Firma mapegy erzeugt für ihre webbasierte Analyse-und Visualisierungssoftware mapegy.scout verschiedene Visualisierungen auf Basis mehrerer Datenquellen wie beispielsweise Patentdaten und wissenschaftliche Publikationen. Eine der Visualisierungen ist eine Patentlandkarte, welche auf Grundlage der benutzerabhängigen Eingabe eine Gruppierung der Patente durchführt (Clusteranalyse) und diese Gruppen auf einer Karte darstellt (Dimensionsreduktion), so dass ähnliche Patente nahe zusammenliegen und unterschiedliche weiter auseinander. Dieser Prozess soll grundlegend überarbeitet werden, damit
Zur Erzeugung der Themenlandkarten wurde eine GHSOM (Growing Hierarchical Self-Organizing Map) gewählt, deren einzelne Teilkarten aus einer Menge von Neuronenmodellen bestehen, die sich an die Trainingsdaten anpassen und somit Clustering und Dimensionsreduktion gleichzeitig realisieren.
Kolloqium: 15.09.2015
Betreuer: Dipl.-Inform. Ingo Boersch, Uwe Kuehn, M.Sc. (mapegy GmbH, Berlin)
Download: A1-Poster
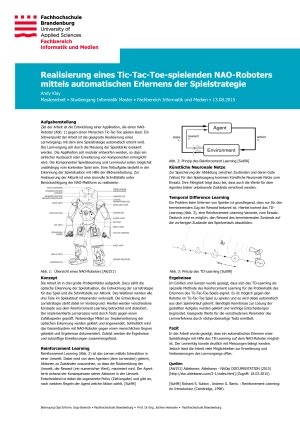
Ziel der Arbeit ist die Entwicklung einer Applikation, die einen NAO-Roboter gegen einen Menschen Tic-Tac-Toe spielen lässt. Perspektivisch soll auch ein Spiel zwischen NAO-Robotern möglich sein. Ein Schwerpunkt der Arbeit ist die geeignete Realisierung eines Lernvorganges, mit dem die Applikation eine Spielstrategie erlernt, bspw. mit Reinforcement-Lernen. Der Lernvorgang soll durch die Messung der Spielstärke evaluiert werden. Wünschenswert ist eine Anzeige der aktuellen Spielstärke.
Die Applikation soll modular entworfen werden, so dass ein einfacher Austausch oder Erweiterung von Komponenten ermöglicht wird. Es soll möglich sein, ein verwandtes Spiel, wie 4x4-Tic-Tac-Toe, umzusetzen, in dem im Wesentlichen nur die spielabhängigen Anteile (wie Spielregeln, Situationserkennung, Zugausführung und Testgegner) modifiziert werden. Die Komponenten Spielsteuerung und Lernmodul sollen möglichst unabhängig vom konkreten Spiel sein.
Eine Teilaufgabe besteht in der Erkennung der Spielsituation mit Hilfe der Bildverarbeitung. Die relative Lage des Spielfeldes zum Roboter kann hierbei als statisch und bekannt vorausgesetzt werden. Sie ist im Rahmen der Arbeit geeignet zu definieren. Zur Ansteuerung der Aktorik ist eine sinnvolle, einfache Schnittstelle unter Berücksichtigung der NAO-Plattform zu realisieren. Die Applikation und Ergebnisse sind in geeigneter Weise zu evaluieren.
Kolloqium: 14.09.2015
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr.-Ing. Jochen Heinsohn
Download: A1-Poster

Die zunehmende Verwendung von Ontologien im klinischen Bereich ist eine Herausforderung für das Gebiet der Onotologie-Evolution. In Anwendungsfällen mit eigenständigen Konzeptualisierungen kann es sinnvoll sein, Ontologien zu verwenden, die durch den Fachexperten erweiterbar sind und die Möglichkeit bieten, das Wissensmanagement direkt in die medizinischen Prozesse zu integrieren. Ein Beispiel ist die Erleichterung der Patientenauswahl für medizinische Studien durch das Studienpersonal. Dabei soll den Experten die Möglichkeit geboten werden, ihre Ontologien in einem redaktionellen Prozess selbständig zu pflegen.
Ziel dieser Arbeit ist die Konzeption und Realisierung einer prototypischen Client-Server-Applikation zur Umsetzung von elementaren Operationen der Ontologie-Evolution als REST-Webservice im Kontext der „Health Intelligence Plattform“ (HIP) für das Wissensmanagement in Krankenhäusern.
Kolloqium: 09.09.2015
Betreuer: Dipl.-Inform. Ingo Boersch, Dr. Christian Seebode (ORTEC medical GmbH)
Download: A1-Poster
Am 17. Juni herrschte wieder reges Treiben im Vorraum der Mensa: dort zeigten 43 Studierende aus 11 Teams ihre Projektarbeiten auf der diesjährigen 4. Projektkonferenz.
Aus dem Labor für Künstliche Intelligenz präsentierte Andy Klay eine Arbeit zum Reinforcement-Lernen von Spielstrategien in humanoiden Robotern: der NAO-Roboter Eve erkennt mittels Bildverarbeitung die Spielsituatuin eines Tic Tac Toe-Spiels und reagiert mit einem eigenen Spielzug. Die dazu nötige Spielstrategie wurde jedoch nicht fest implementiert, sondern wird durch den Roboter beim Spielen gegen menschliche und künstliche Gegenr entwickelt, in dem er versucht herauszufinden, in welchen Situation, welche Züge zu einem späteren Spielgewinn führen. Schwache Gegner wird er versuchen auszutricksen und von starken Gegnern wird er Strategien übernehmen.
Reinforcement-Lernen ist in der Grundidee ein einfaches Lernparadigma, bei dem der Lerner nicht passiv die Belehrung durch den Lehrer hinnimmt (wie beim supervised learning), sondern aktiv durch eigene Aktionswahl seinen Lernprozess steuert. Der Lerner erntscheidet also, welche neuen Erfahrungen er machen möchte oder ob er lieber bei bewährten Aktionen bleibt. Die praktische Umsetzung wird schwierig, wenn die Umgebung stochastisch reagiert, nur schwer zu erkennen ist, einen Gegner enthält, sehr viele Zustände umfasst oder die Belohnung/Bestrafung verzögert erfolgt. Mindestens zwei dieser Merkmale weist das Tic Tac Toe-Spiel auf.
NAO und Eve vorm KI-Labor:

Ziel der Arbeit ist eine verteilte Applikation, die Tweets über die Streaming-API des Kurznachrichtendienstes Twitter empfängt und diese auf den Pioneer-Robotern vorliest. Die implementierte Anwendung soll Tweets anhand frei wählbarer Suchworte filtern können und auf bestimmte Tweets mit Reaktionen, bspw. eigenen Tweets der Roboter, reagieren. Für Anwender, die keinen Twitter-Account besitzen, soll eine alternative Internetseite im responsive Design angeboten werden. Der Schwerpunkt der Arbeit ist der Softwareengineering-Prozess sowie die Beschreibung aller verwendeten Dienste und Schnittstellen.
Kolloqium: 14.04.2015
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr.-Ing. Jochen Heinsohn
Download: A1-Poster
Ziel der Arbeit ist die Evaluation von Algorithmen zur Schlagwort-Extraktion aus Dokumenten. Gesucht wird eine Methode, die sich im Kontext der Erstellung von Technologie-Übersichtskarten aus u.a. Patentschriften zur möglichst eindeutigen Beschreibung einzelner Dokumente oder Dokumentmengen eignet. Kriterien zur Abbildung von Beschreibungsgüte und Performanz sollen geeignet definiert und erhoben werden. Ausgewählte Algorithmen sollen in einem SE-Prozess umgesetzt werden. Eine besondere Schwierigkeit der Aufgabe ergibt sich durch die Arbeit mit realen Datenmengen (Stemming, Stoppworte etc.).
Anforderungen an die Algorithmen sind der Umgang mit großen Datenmengen, Laufzeit und das Finden geeigneter Schlüsselworte und –Phrasen. Es werden drei Anwendungsfälle (Suche in Daten, Clustern, Keyword-Cloud) unterschieden. Fünf Algorithmen aus dem Bereich der unüberwachten Extraktion werden dargestellt, implementiert und evaluiert. Es erfolgt eine Aufteilung in zwei Klassen, je nachdem, ob zur Schlagwort-Bestimmung eines Dokumentes die gesamte Dokumentenmenge berücksichtigt wird (TFIDF, CorePhrase) oder nicht (TextRank, Rake, statistische Kookkurrenz-Auswertung). Abschließend erfolgt nach einer Komplexitätsabschätzung die Umsetzung zweier Ansätze in einsatzbereite RapidMiner-Operatoren.
Kolloqium: 09.04.2015
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr. rer. nat. Gabriele Schmidt, Uwe Kuehn M. Sc. (mapegy GmbH)
Download: A1-Poster
 Evaluation von Real-Time Appearance-Based Mapping zum Simultaneous
Localization and Mapping mit RGB-Depth-Sensorik unter dem Robotic
Operating System
Evaluation von Real-Time Appearance-Based Mapping zum Simultaneous
Localization and Mapping mit RGB-Depth-Sensorik unter dem Robotic
Operating System
Ziel der Arbeit ist die Evaluation des SLAM-Verfahrens RTAB-Map. Das Verfahren integriert aufeinanderfolgende Tiefenbilder eines Kinect-Sensors mit Hilfe einer Korrespondenzanalyse in den zugehörigen Farbbildern zu einer farbigen Punktwolke. Das Verfahren soll im Detail erläutert werden.
Zur Evaluation sind geeignete Kriterien anhand von Anwendungsszenarien zu definieren und in Versuchen zu prüfen. Das Schließen von Positionsschleifen, also das Wiedererkennen schon besuchter Orte soll berücksichtigt werden. Anwendungsszenarien können sein: SLAM auf dem Pioneer-Roboter, 3D-Modellierung durch freie Bewegung, Modellierung von Gebäuden, Beobachtung dynamischer Objekte (Personen, Roboter, Drohnen) durch mehrere Kinect-Sensoren. Die Installation unter der aktuellen ROS-Version soll nachvollziehbar dargestellt werden. Die besondere Schwierigkeit der Arbeit liegt beim Einarbeiten in teilweise komplizierte Ansätze aktueller Robotertechnologien und beim Umsetzen in lauffähige Expe rimente.
Kolloqium: 14.11.2014
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr.-Ing. Jochen Heinsohn
Download: A1-Poster
 Konzeption und Implementierung eines reaktiven
Pfadplanungsverfahrens für 3D-Umgebungen basierend auf dem Elastic Band
Framework
Konzeption und Implementierung eines reaktiven
Pfadplanungsverfahrens für 3D-Umgebungen basierend auf dem Elastic Band
Framework
Moderne autonome mobile Roboter werden mit komplexen Aufgabenstellungen konfrontiert. Zur Erfüllung dieser Aufgaben agieren sie häufig in einer dynamischen Umgebung und müssen bei der Navigation drei Raumdimensionen berücksichtigen. Pfadplanung in solchen Umgebungen ist durch hohe Komplexität geprägt und Gegenstand aktueller Forschung.
In dieser Arbeit wird ein reaktives Pfadplanungsverfahren auf Grundlage des Elastic Band Framework implementiert. Das Elastic Band Framework löst das Problem der hohen Komplexität, indem es die Pfadplanung in zwei Teilprobleme aufteilt. Ein globaler Pfad wird unter Annahme einer statischen Umgebung initial geplant und als ein elastisches Band interpretiert. Interne und externe Kräfte modifizieren das elastische Band kontinuierlich und passen es den dynamischen Änderungen der Umgebung an.
Ein vorhandenes Elastic-Band-Pfadplanungsverfahren wird für den Serviceroboter Care- O-bot® 3 für den Einsatz in einer dreidimensionalen Umgebung erweitert. Dafür werden konzeptionelle Änderungen erarbeitet und unter dem Robot Operating System implementiert. Die Eignung des entwickelten Pfadplanungsverfahrens für den Anwendungsfall wird durch eine Evaluierung in einer Simulationsumgebung und durch einen Funktionsnachweis am physischen Roboter aufgezeigt.
Kolloqium: 14.11.2014
Betreuer: Dipl.-Inform. Ingo Boersch, Dipl.-Ing. Matthias Gruhler (Fraunhofer IPA Stuttgart, Department Robot and Assistive Systems), Prof. Dr.-Ing. Jochen Heinsohn
Download: A1-Poster, Abschlussarbeit
 Evolution regulärer Ausdrücke zur Segmentierung digitalisierter
Keilschrifttafeln in 3D
Evolution regulärer Ausdrücke zur Segmentierung digitalisierter
Keilschrifttafeln in 3D
Ziel der Arbeit ist die Segmentierung dreiecksvernetzter Punktwolken digitalisierter Keilschrifttafeln zur Detektion von Oberflächen und Bruchstellen. Hierzu sollen in der Punktwolke Flächenmerkmale mit dem Blowing-Bubble-Algorithmus bestimmt und anhand von regulären Ausdrücken klassifiziert werden, die mit evolutionären Algorithmen entwickelt werden. Die Applikation und Ergebnisse sind in geeigneter Weise zu evaluieren.
Kolloqium: 19.09.2014
Betreuer: Prof. Dr. Friedhelm Mündemann, Dipl.-Inform. Ingo Boersch
 Systematic Review zum Data Mining zur Prognose von Punktdurchmessern beim Widerstandspunktschweißen
Systematic Review zum Data Mining zur Prognose von Punktdurchmessern beim Widerstandspunktschweißen
Ziel der Arbeit ist eine systematische Übersichtsarbeit zum Stand der Forschung zum Thema Data Mining zur Prognose von Punktdurchmessern von Schweißpunkten beim Widerstandspunktschweißen, insbesondere anhand von Verlaufsgrößen. Hierzu sind die relevanten Forschungsergebnisse möglichst vollständig zu identifizieren, darzustellen, zu beurteilen und zusammenzufassen.
Die Bestimmung relevanter Veröffentlichungen soll systematisch nach einer dokumentierten Methodik erfolgen. Hierzu sind geeignete Suchstrings, Datenquellen, Vorgehensweisen und Kriterien zur Auswahl und Relevanz von Publikationen zu definieren. Die ausgewählten Publikationen sind tabellarisch zusammenzufassen und inhaltlich einzeln kurz vorzustellen. Hierbei sollte sich an vorher formulierten Fragestellungen orientiert werden, wie bspw. Merkmalsdefinition, Modellart, Evaluationsmethode, Prognosegüte oder Datenbasis, die zur Weiterführung des FHB-Projektes sinnvoll sind
Kolloqium: 15.09.2014
Betreuer: Dipl.-Inform. Ingo Boersch, Dipl. Ing. Christoph Großmann (Technische Universität Dresden)
Download: A1-Poster
 Architektur und Nutzerschnittstelle zur Missionskontrolle und
-Visualisierung für autonome reaktive Roboter in einem einfachen
Personal Rapid Transit
Architektur und Nutzerschnittstelle zur Missionskontrolle und
-Visualisierung für autonome reaktive Roboter in einem einfachen
Personal Rapid Transit
Ziel der Arbeit ist die Entwicklung einer Applikation zur Missionskontrolle und –visualisierung zur Nutzung im Lehrprojekt „Masdar City“ im Bachelorstudiengang Informatik. Hierzu sind die Anforderungen zu analysieren, bspw. welche Phasen die Kommunikation umfasst, ein gegen Übertragungsfehler und -verluste abgesichertes Protokoll sowie eine Client-Server-Architektur zu konzipieren und umzusetzen. Der Funktionsnachweis soll mit einem Kommunikations-Simulator erbracht werden, der als Textdatei vordefinierte Testfälle abspielt.
Kolloqium: 13.06.2014
Betreuer: Prof. Dr.-Ing. Jochen Heinsohn, Dipl.-Inform. Ingo Boersch
Download: A1-Poster
 Improving Local Navigation by Application of Scan Matching
Techniques in Mobile Robotics
Improving Local Navigation by Application of Scan Matching
Techniques in Mobile Robotics
Ziel der Arbeit ist die Untersuchung verschiedener Registrierungsalgorithmen in Bezug auf die Navigation eines mobilen Roboters vom Typ KUKA. Hierzu sind geeignete Testszenarien zu definieren sowie Versuche zu planen. Anhand selbst gewählter Kriterien sind die Algorithmen zu bewerten und ein begründeter Umsetzungsvorschlag abzugeben. Der Roboter kann simuliert werden. Es werden die Auswirkungen von Scan-Matching-Techniken auf die lokale Navigation eines KUKA omniRob untersucht. Eine Verbesserung der Navigation soll vor allem vor und in vom Roboter befahrenen engen Bereichen angestrebt werden. Bisher korrigierte der Roboter seine Position aufgrund fehlender Genauigkeit sehr häufig vor engen Stellen. Weiterhin soll eine Änderung an der Navigationskomponente in Situationen nach angewandtem Scan-Matching für eine optimierte Fahrt sorgen. Da der reale omniRob noch nicht mit allen Implementierungen verfügbar ist, wird durchgehend in einer Simulation gearbeitet.
Kolloqium: 18.10.2013
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr.-Ing. Jochen Heinsohn • Fachhochschule Brandenburg • Dipl.-Math. Christian Rink M. Sc., Dipl.-Math. techn. Daniel Seth • Institut für Robotik und Mechatronik des Deutschen Zentrums für Luft- und Raumfahrt
Download: A1-Poster, Abschlussarbeit
 Definition und Implementierung einer CTS2-standardisierten Abbildung
von Terminologien aus dem Bereich des Infektionsschutzes
Definition und Implementierung einer CTS2-standardisierten Abbildung
von Terminologien aus dem Bereich des Infektionsschutzes
Ziel der Arbeit ist die Abbildung eines Begriffssystems des Robert-Koch-Institutes aus dem Bereich des Infektionsschutzes in das vom Fraunhofer FOKUS entwickelte System CTS2-Le (RDFS-Ontologie) gemäß CTS2-Standards von OMG und HL7. Die Abbildung ist in geeigneter Weise zu evaluieren. Die Eignung der Abbildung zur Wissensrepräsentation ist durch die Implementierung eines einfachen Terminologie-Laders und eine erfolgreiche Kompetenzprüfung anhand geeignet formulierter Kompetenzfragen nachzuweisen.
Kolloqium: 19.09.2013
Betreuer: Dipl.-Inform. Ingo Boersch, Dr.-Ing. Andreas Billig (Fraunhofer FOKUS, Kompetenzzentrum E-HEALTH)
Download: A1-Poster, Abschlussarbeit
 Automatische und assistierende Personaleinsatzplanung basierend auf CSP
Automatische und assistierende Personaleinsatzplanung basierend auf CSP
Das vorliegende Problem der Personaleinsatzplanung ist ein Zuordnungsproblem und gehört der Klasse NP-schwer an. Im Allgemeinen sind solche Probleme nicht in praktisch angemessener Zeit lösbar. Mit problemspezifischen Suchalgorithmen können diese Probleme dennoch auf aktueller Rechentechnik gelöst werden.
Diese Masterarbeit hat das Ziel, das Problem der Personaleinsatzplanung des Unternehmen Coffee Corner zu lösen. Hierbei geht es um die Zuordnung von Mitarbeitern M zu Arbeitsstationen A zu bestimmten Zeiteinheiten Z, wobei M, A und Z Mengen darstellen. Es müssen demnach |A| · |Z| Variablen belegt werden, welche jeweils |M| Werte annehmen können. Der aufgespannte Suchraum umfasst |M||A|·|Z| Zuordnungsmöglichkeiten und somit 10 hoch 875 potenzielle Lösungen. Doch nicht jede Zuordnungsmöglichkeit ist eine gültige Lösung. Ob eine Zuordnungsmöglichkeit eine gültige Lösung ist, wird durch die Einhaltung von Nebenbedingungen entschieden. Ein Ausprobieren aller Möglichkeiten mit Prüfung auf Einhaltung der Nebenbedingungen ist bei steigender Anzahl von Arbeitsstationen, Mitarbeitern und Zeiteinheiten zeitlich zu aufwändig.
Ziel der Arbeit ist eine Untersuchung der Constraint-Propagierung zur Lösung von Personaleinsatzproblemen und die prototypische Umsetzung. Die Evaluation umfasst die Definition geeigneter Kriterien zur Wertung von Plänen, Auswahl von Constraintoptimierungs-Bibliotheken, Heuristiken zur Reduktion des Suchraumes sowie die Integration von Planung und Neuplanung anhand eines realen Anwendungsfalles in der Stadt Brandenburg.
Kolloqium: 30.08.2013
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr.-Ing. Michael Syrjakow
Download: A1-Poster
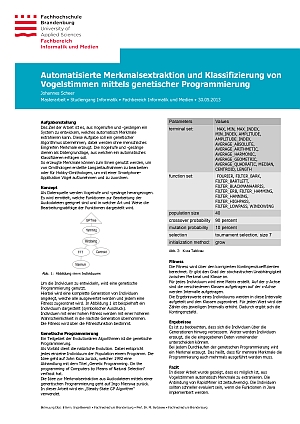 Automatisierte Merkmalsextraktion und Klassifizierung von
Vogelstimmen mittels genetischer Programmierung
Automatisierte Merkmalsextraktion und Klassifizierung von
Vogelstimmen mittels genetischer Programmierung
Ziel der Arbeit ist die Evaluation einer Methode zur automatischen Merkmalsextraktion mit Genetischem Programmieren. auf diesem Wege sollen Merkmale definiert werden, die sich zur Klassifikation von Vogelstimmen eignen. So erzeugte Merkmale können zum Einen genutzt werden, um von Ornithologen erstellte Langzeitaufnahmen zu bearbeiten oder für Hobby-Ornithologen, um mit einer Smartphone-Applikation Vögel aufzunehmen und zuzuordnen.
In der Arbeit soll aufbauend auf Arbeiten an der Universität Dortmund von Ingo Mierswa und Katharina Morik die prinzipielle Eignung des Ansatzes untersucht und anhand einer praktischen Umsetzung bewertet werden. Schwerpunkt sei hierbei die erfolgreiche und weiterverwendbare Umsetzung des Evolutionszyklus im GP-Framework ECJ.
Kolloqium: 28.06.2013
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr.-Ing. Michael Syrjakow
Download: A1-Poster
 Kameragestützte Feinpositionierung eines Quadrokopters
Kameragestützte Feinpositionierung eines Quadrokopters
Das Ziel der vorliegenden Arbeit ist die Erweiterung der Steuerung eines Quadrokopters vom Typ MikroKopter2. Mit Hilfe einer am MikroKopter montierten Kamera soll es ermöglicht werden Objekte autonom zu finden und eine Position über diesen einzunehmen. Zuvor soll eine GPS-gestützte Grobpositionierung des MikroKopters in der Nähe des gesuchten Objektes erfolgen.
 Die Aufgabenstellung gliedert sich in zwei Teile. Im ersten Teil soll
zunächst eine Analyse der bestehenden Zielplattform erfolgen. Es soll
herausgearbeitet werden, aus welchen Komponenten der MikroKopter besteht
und wie diese zusammenarbeiten. Besondere Aufmerksamkeit soll der
Hierarchie der verschiedenen Steuerquellen, wie z. B. Fernsteuerung, GPS
und der Kontrolle über die Datenschnittstelle, gewidmet werden. Der
zweite Teil umfasst die Konzeption und praktische Umsetzung der
erweiterten Steuerung. Dies beinhaltet die GPS-gestützte
Grobpositionierung des MikroKopters sowie die Objektfindung und
Verfolgung mit bildverarbeitenden Verfahren.
Die Aufgabenstellung gliedert sich in zwei Teile. Im ersten Teil soll
zunächst eine Analyse der bestehenden Zielplattform erfolgen. Es soll
herausgearbeitet werden, aus welchen Komponenten der MikroKopter besteht
und wie diese zusammenarbeiten. Besondere Aufmerksamkeit soll der
Hierarchie der verschiedenen Steuerquellen, wie z. B. Fernsteuerung, GPS
und der Kontrolle über die Datenschnittstelle, gewidmet werden. Der
zweite Teil umfasst die Konzeption und praktische Umsetzung der
erweiterten Steuerung. Dies beinhaltet die GPS-gestützte
Grobpositionierung des MikroKopters sowie die Objektfindung und
Verfolgung mit bildverarbeitenden Verfahren.
Kolloquium: 25.03.2013
Betreuer: Prof. Dr. sc. techn. Harald Loose, Dipl.-Inform. Ingo Boersch
Download: A1-Poster, Diplomarbeit
 Bildbasierte 3-D-Rekonstruktion von Gesichtern mittels
CUDA-gestützter Anpassung von Dreiecken
Bildbasierte 3-D-Rekonstruktion von Gesichtern mittels
CUDA-gestützter Anpassung von Dreiecken
Ziel der Arbeit ist die Konzeption und Umsetzung der Rekonstruktion eines dreidimensionalen Gesichtsmodells aus Bildern mit der CUDA-Technologie von NVIDIA. Die Farbbilder in hoher Auflösung stammen von kalibrierten Kameras. Hierzu sind Konzepte massiv paralleler Architekturen und dafür geeigneter Algorithmen darzustellen. Stereoanalyse und alternative Verfahren sind auf ihre Eignung und Portierbarkeit auf die GPU zu untersuchen.
Schwerpunkt der Arbeit sind Verfahren zur 3D-Rekonstruktion aus Bildern unter besonderer Berücksichtigung der Umsetzung auf einer GPU. Auf eine formale Darstellung, insbesondere eigener Konzepte, ist Wert zu legen. Der praktische Teil umfasst die Auswahl, Konzeption und Umsetzung eines Verfahrens in eine robuste, korrekte, zuverlässige und in Geschwindigkeit optimierte Applikation unter Nutzung der Ergebnisse des theoretischen Schwerpunkts. Nutzer der Applikation sind in die Anforderungsanalyse einzubeziehen. Die Erfüllung der Anforderungen ist in geeigneter Form nachzuweisen.
Kolloquium: 30.01.2013
Betreuer: Prof. Dr. rer. nat. Friedhelm Mündemann, David Schneider, M.A. (Fraunhofer Heinrich-Hertz-Institut), Dipl.-Inform. Ingo Boersch
Download: A1-Poster
 Unter dem Motto „innovativ und exzellent“ zeichnete die Fachhochschule
Brandenburg am 7. Dezember Nachwuchswissenschaftler mit dem
Innovationspreis 2012 aus. Der Preis wird für herausragende, an
betrieblichen Bedürfnissen orientierte Innovationen vergeben und von
Unternehmen der Region gestiftet.
Unter dem Motto „innovativ und exzellent“ zeichnete die Fachhochschule
Brandenburg am 7. Dezember Nachwuchswissenschaftler mit dem
Innovationspreis 2012 aus. Der Preis wird für herausragende, an
betrieblichen Bedürfnissen orientierte Innovationen vergeben und von
Unternehmen der Region gestiftet.
Platz drei des Innovationspreises wurde in diesem Jahr an David Walter vergeben, der in seiner Masterarbeit erfolgreich ein Verfahren zur Prognose des Stromverbrauches für die Stadtwerke Brandenburg an der Havel GmbH entwickelte.
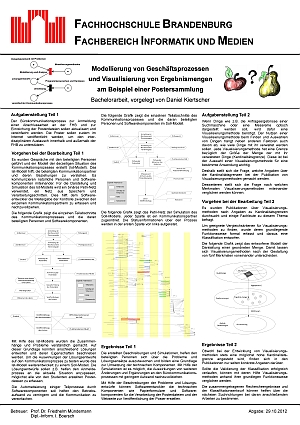 Modellierung von Geschäftsprozessen und Visualisierung von
Ergebnismengen am Beispiel einer Postersammlung
Modellierung von Geschäftsprozessen und Visualisierung von
Ergebnismengen am Beispiel einer Postersammlung
Ziel der Arbeit ist eine Geschäftsprozessoptimierung an der FH Brandenburg mit dem Ziel, die Erstellung, Erfassung und Nutzung von Abschlusspostern zu verbessern. Die besondere Schwierigkeit der Aufgabe liegt in den betriebswirtschaftlichen Aspekten, wie Prozessanalyse und –darstellung, dem Umfang und Abgrenzung des zu untersuchenden Prozesses, sowie der Vorgabe von Petri-Netzen zur Formalisierung von Nebenläufigkeiten. Ein weiterer Schwerpunkt ist die Untersuchung von Visualisierungsvarianten für Postermengen unter anderem zur Webdarstellung.
Kolloquium: 23.11.2012
Betreuer: Prof. Dr. Friedhelm Mündemann, Dipl.-Inform. I. Boersch
Download: A1-Poster
 Entwicklung und Evaluation eines multimodalen Empfehlungssystems für
Lokationen
Entwicklung und Evaluation eines multimodalen Empfehlungssystems für
Lokationen
In den vergangenen Jahren haben multimodale Anwendungen den Schritt von der Forschung in die Praxis gemacht. Ziel der Kombination verschiedener Modalitäten wie Sprache und Touch (Berührung) ist es, eine bessere und natürlichere Interaktion zwischen Benutzer und System zu ermöglichen.
In dieser Arbeit wurde ein leichtgewichtiges, multimodales, karten-basiertes Empfehlungssystem für das Auffinden von Lokationen zur Erfüllung von Aufgaben entwickelt. Existierende Dienste und Komponenten – wie zum Beispiel zur Georeferenzierung oder zur Spracherkennung – wurden erfolgreich zu einem funktionierenden System kombiniert. Der Einsatz von Webtechnologien wie HTML, CSS und JavaScript vereinfacht die Portierung der mobilen Android-App auf andere Plattformen. Eine in JavaScript definierte Grammatik erlaubt verschiedene Varianten bei der Spracheingabe.
Im Anschluss an die Entwicklung wurde eine Evaluation des Systems mit zwölf Versuchsteilnehmern vorgenommen. Diese beinhaltete neben dem Lösen von jeweils sechs Aufgaben die Beantwortung zweier Fragebögen. Es wurde insbesondere untersucht, ob Daten sozialer Netzwerke den Benutzer bei der Auswahl von Lokationen unterstützen können (H1) und ob Sprache die Eingabe erleichtert (H2). Die Befragung zeigt, dass 11 von 12 Personen der Meinung sind, dass soziale Netzwerke bei der Entscheidungsfindung helfen. Zehn der 12 Probanden bevorzugten die (initiale) Eingabe via Sprache. Nach dem Lösen der Aufgaben verbesserte sich die Bewertung der Nützlichkeit von Spracheingabe bei fünf Personen – nur eine Person änderte ihre Einschätzung zum Negativen. Beide Hypothesen ließen sich somit bestätigen.
Kolloquium: 02.10.2012
Betreuer: Prof. Dr. Jochen Heinsohn, Dipl.-Inform. Ingo Boersch, Dr. Tatjana Scheffler (DFKI), Dipl.-Inf. Rafael Schirru (DFKI)
Download: A1-Poster, Abschlussarbeit
 Repräsentation medizinischen Wissens mit Drools am Beispiel der
Adipositas-Leitlinie
Repräsentation medizinischen Wissens mit Drools am Beispiel der
Adipositas-Leitlinie
Ziel der Arbeit ist die Untersuchung, inwieweit sich die Rule Engine Drools zur Repräsentation und Verarbeitung medizinischen Regelwissens eignet. Dazu soll die Leitlinie zur Prävention und Therapie von Adipositas prototypisch in einem wissensbasierten System modelliert werden. Des Weiteren soll ein Benutzerhandbuch für Droolseinsteiger entstehen.
Praktisches Ergebis der Arbeit sei ein prototypisches wissensbasiertes System zum Laden und Verarbeiten (Vorwärtsverkettung) einer Regel- und Faktenbasis (Patientendaten) zur Adipositas-Therapie.
Kolloquium: 02.10.2012
Betreuer: Prof. Dr. Jochen Heinsohn, Dipl.-Inform. Ingo Boersch
Download: A1-Poster, Abschlussarbeit, Programm, Quelltext, Wissensbasis (zip, 11MB)
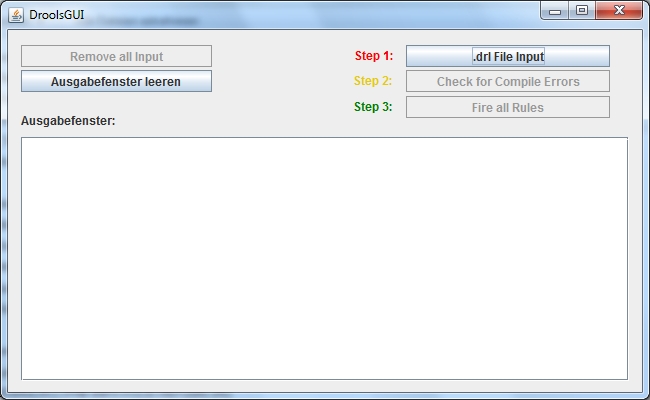
Zum Start des Programmes die ZIP-Datei auspacken und das Programm mit einem Doppelklick auf 'Quellcode\DroolsGui\DroolsGUI.jar' starten. Im Programm zunächst die vier Bestandteile der Wissensbasis (dataModel.drl, diagnose_rules.drl, testPatienten.drl und therapie_rules.drl) im Verzeichnis 'Quellcode\Drools Rule Files' laden, die Wissensbasis kompilieren und zum Schluss die Vorwärtsverkettung starten.
Für eigene Versuche können die DRL-Files (Wissensbasis als Textdatei) mit einem beliebigen Editor verändert oder eigene DRL-Files verwendet werden.
 Entwurf und Implementierung von Suchverfahren am Beispiel des Spiels “Rush-Hour” mit Visualisierung der Lösungsfindung
Entwurf und Implementierung von Suchverfahren am Beispiel des Spiels “Rush-Hour” mit Visualisierung der Lösungsfindung
Ziel der Bachelorarbeit ist die Entwicklung einer Applikation zur Visualisierung einfacher Suchalgorithmen am Beispiel des Rushhour-Problems.
Insbesondere soll das Laden verschiedener Problemkonfigurationen der Rush-Hour-Domäne in einer geeigneten textuellen Repräsentation, das Finden einer oder aller Lösungen sowie das Verfolgen der Arbeitsweise der Suchalgorithmen (Tiefensuche, Breitensuche, A*) ermöglicht werden. Der Zustandsraum der Suchprobleme soll in geeigneten Metriken (bspw. Anzahl der Knoten, Anzahl der Lösungen) dargestellt werden.
Kolloquium: 27.09.2012
Betreuer: Prof. Dr. rer. nat. Rolf Socher, Dipl.-Inform. Ingo Boersch
Download: A1-Poster
 Modellierung der Studien- und Prüfungsordnung des Studiengangs
Bachelor Informatik in OWL
Modellierung der Studien- und Prüfungsordnung des Studiengangs
Bachelor Informatik in OWL
Ziel der Bachelorarbeit ist die ontologische Modellierung der Studien- und Prüfungsordnung der Informatik.
Die Ordnung soll in maschinenverständlicher Form, d.h. zugänglich für Visualisierung, Navigation, Abfragen und Inferenzen im Sinne des Semantic Web repräsentiert werden. Das konkrete Ziel ist eine Ontologie, die zu bestimmten Themen des Studiums befragt werden kann. Sie soll alle Fragen beantworten, die auch mit der originalen Ordnung beantwortet werden. Zudem sollten Schlüsse gezogen werden können, die weiteres Wissen generieren. Fragen könnten sein:"Was sind Pflichtfächer?", "Muss ich ein Praktikum machen?", "Wie lang ist die Bearbeitungszeit für eine Bachelorarbeit?".
Die Ontologie soll sich auf andere (ähnliche) Prüfungs- und Studienordnungen erweitern lassen.
Kolloquium: 18.09.2012
Betreuer: Prof. Dr. Jochen Heinsohn, Dipl.-Inform. Ingo Boersch
Download: A1-Poster
 Interaktive Evolution zur Assistenz bei der Einrichtungsplanung
Interaktive Evolution zur Assistenz bei der Einrichtungsplanung
Die Planung der Inneneinrichtung von Räumen ist oft aufwändig und zeitintensiv, da ein weites Spektrum verschiedenster Einrichtungsgegenstände verfügbar ist und diese fast beliebig kombiniert werden können. Diese Arbeit schlägt interaktive evolutionäre Algorithmen zur Assistenz bei der Einrichtungsplanung vor. Dazu werden zunächst die Bestandteile der interaktiven Evolution genauer definiert und Arten der interaktiven Selektion vorgestellt. Anschließend wird die Konzeption und Entwicklung des Softwaresystems dokumentiert.
Zur Verringerung der Benutzerermüdung wird die Methode der Sparse Fitness Evaluation umgesetzt. Es werden Versuche mit der entwickelten Software durchgeführt und aufgetretene Probleme diskutiert. Abschließend gibt die Arbeit einen Ausblick für eine weitere Entwicklung.
Kolloqium: 29.08.2012
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr.-Ing. Michael Syrjakow
Download: A1-Poster, Masterarbeit, Quelltexte (85MB)
Software: Furny-1.0.zip in ein beliebiges Verzeichnis entpacken, in dieses Verzeichnis wechseln und den gewünschten Teil mit den .bat-Dateien starten
 Modellierung und Simulation eines autonomen Segelbootes
Modellierung und Simulation eines autonomen Segelbootes
Ziel der Arbeit ist es, ein Bewegungsmodell zu entwickeln, welches die Bewegungen eines Segelbootes im Wasser abbildet, und dieses zu simulieren. Augenmerk bei der Modellierung liegt auf der Darstellung physikalischer Zusammenhänge, die am Segelboot zum Tragen kommen. Sowohl Bereiche der Mechanik als auch der Strömungsdynamik müssen in Betracht gezogen werden.
Neben dem Modell soll ein Simulationsprogramm entstehen, mit dessen Hillfe Anwendungsfälle am Computer getestet werden können.
Kolloquium: 24.08.2012
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr. Jochen Heinsohn
Download: A1-Poster
 Konzeption und Realisierung einer kontextbasierten Suche in externen
Datenquellen im Bereich der Neurobiologie
Konzeption und Realisierung einer kontextbasierten Suche in externen
Datenquellen im Bereich der Neurobiologie
Diese Masterarbeit befasst sich mit der Konzeption und Realisierung einer kontextbasierten Suche in externen Datenquellen. Die kontextbasierte Suche soll hierbei für das Abfragen der Datenquellen die Daten eines bestehenden Systems verwenden. Die Daten des bestehenden Systems basieren dabei auf neurologischen Erkrankungen und Testverfahren.
Die Ergebnisse der kontextbasierten Suche sollen zum einen dafür verwendet werden, um einem Benutzer des Systems ein größeres Angebot an Informationen zum Themengebiet zu unterbreiten und zum anderen um den Datenbestand des Systems bei Bedarf zu aktualisieren. Die externen Datenquellen sind PubMed und MedWorm. Dabei werden in PubMed relevante, medizinische, Publikationen und in MedWorm nach relevanten medizinischen Nachrichten gesucht.
Kolloqium: 13.08.2012
Betreuer: Prof. Dr.-Ing. Susanne Busse, Dipl.-Inform. Ingo Boersch
Download: A1-Poster, Masterarbeit, opus
 Programmierung eines patrouillierenden Roboters unter Verwendung von
ARIA, ARNL und MobileEyes zur Selbstlokalisierung, dynamischen
Pfadplanung und Missionskontrolle
Programmierung eines patrouillierenden Roboters unter Verwendung von
ARIA, ARNL und MobileEyes zur Selbstlokalisierung, dynamischen
Pfadplanung und Missionskontrolle
Ziel ist die Konzeption und Umsetzung einer zuverlässigen Patroullienmission eines autonomen Pioneer-Roboters. Die Definition und Kontrolle der Mission soll über ein geeignetes Userinterface erfolgen sowie der Verlauf visualisiert werden. Perspektivisch soll die Lösung nicht ans Informatikgebäude gebunden, sondern über eine definierte Schrittfolge bspw. auch im Audimax einsetzbar sein.
Die besondere Schwierigkeit besteht in der Anforderung einer hohen Zuverlässigkeit bei der Missionsausführung und der Gewährleistung der Personensicherheit im Aktionsbereich des Systems. Die geforderten Eigenschaften sind beim Entwurf zu berücksichtigen und geeignet nachzuweisen. Vorhandene Frameworks zur Pfadplanung, Fahrtausführung und Lokalisierung wie ARNL, ARIA und Mapper3 sollen verwendet werden.
Kolloquium: 19.06.2012
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr. Jochen Heinsohn
Download: A1-Poster
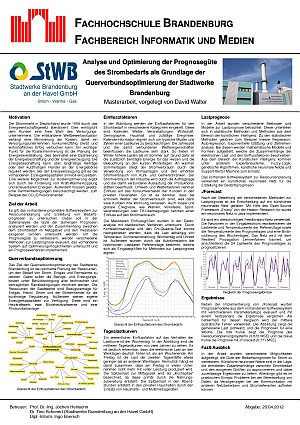 Analyse und Optimierung der Prognosegüte des Strombedarfs als Grundlage
der Querverbundsoptimierung der Stadtwerke Brandenburg
Analyse und Optimierung der Prognosegüte des Strombedarfs als Grundlage
der Querverbundsoptimierung der Stadtwerke Brandenburg
Es gilt das vorhandene proprietäre Softwaresystem zur Ressourcenplanung und Erstellung von Bedarfsprognosen zu untersuchen. Dabei soll in der Datenanalyse die Güte der bisherigen Prognosen analysiert werden und der Zusammenhang zwischen dem Strombedarf im Netzgebiet und den messbaren exogenen Größen untersucht werden. Um die Prognosegüte zu verbessern, werden verschiedene Methoden zur Lastprognose evaluiert, das vorhandene System auf Optimierungsmöglichkeiten untersucht und ein Prognoseverfahren implementiert.
Neben der Implementierung von JForecast wurden Prognosemodelle aus dem vorhandenen Softwaresystem mit verschiedenen Parametersetups evaluiert und mit einem Testszenario die Ergebnisse verglichen.
Kolloquium: 01.06.2012
Betreuer: Prof. Dr.-Ing. Jochen Heinsohn, Dr. Tino Schonert (Stadtwerke Brandenburg an der Havel GmbH), Dipl.-Inform. Ingo Boersch
Download: A1-Poster
 Entwicklung und Evaluierung von Clustering-Verfahren für Points of
Interest verschiedener thematischer Kategorien
Entwicklung und Evaluierung von Clustering-Verfahren für Points of
Interest verschiedener thematischer Kategorien
In dieser Arbeit geht es um die Entwicklung einer Anwendung zur Darstellung von konzentrierten Gebieten von Points of Interest (PoIs). Dadurch soll einem Anwender z. B. ein Ballungsgebiet von Restaurants innerhalb des urbanen Umfelds angezeigt werden.
Der Vorgang, Wertemengen nach ihrer Ähnlichkeit (hier nach geographischer Distanz) zu gruppieren, ist eine Disziplin des Data Minings und wird als Cluster-Analyse bezeichnet. Verschiedene Clustering-Verfahren sollen getestet und angepasst werden, um ihre Eignung für die Aufgabenstellung zu bewerten und zu optimieren.
Evaluiert wurden das Minimum spanning tree Clustering, k-Means, sowie ein selbstentwickeltes DK-Means-Verfahren.
Kolloquium: 10.02.2012
Betreuer: Dipl.-Inform. Ingo Boersch, Dr. Inessa Seifert (DFKI)
Download: A1-Poster
 Analyse von Matching-Verfahren und Konzeption für eine auf Angebot und
Nachfrage basierende Plattform – Prototypische Implementierung am
Beispiel einer Lehrstellenbörse
Analyse von Matching-Verfahren und Konzeption für eine auf Angebot und
Nachfrage basierende Plattform – Prototypische Implementierung am
Beispiel einer Lehrstellenbörse
In dieser Arbeit wird das als Matching bezeichnete Zuordnungsproblem zwischen Nachfrage generierenden Benutzern und Angebot repräsentierenden Objekten untersucht. Ziel ist eine automatische, individuelle Auswahl von geeigneten Objekten für den einzelnen Nutzer, die seinen Präferenzen entsprechen. Beschränkt wird diese Problematik auf webbasierte Plattformen, wobei die registrierten Benutzer durch Nutzerprofile beschrieben werden und die Angebote als Objekte angesehen werden, deren Eignung für die einzelnen Nutzer bestimmt werden soll.
Zur Lösung dieses Problems stehen verschiedene Ansätze zur Verfügung. Empfehlungssysteme erstellen Vorschläge basierend auf vorhandenen Bewertungen des Nutzers für Objekte. Die Clusteranalyse gruppiert die Objekte zu Clustern, die eine möglichst homogene Menge an Objekten beinhalten. Eine hohe Eignung wird Objekten aus Clustern unterstellt, aus denen bisher positiv bewertete Objekte stammen. Klassifizierungs- und Regressionsverfahren berechnen eine Klassenzuordnung bzw. eine numerische Prognose, die Aussagen über die Eignung eines Objekts treffen.
Die Verfahren werden hinsichtlich ihrer Eignung für das beschriebene Problem evaluiert. Auf Basis dieser Untersuchung wird ein Konzept für das Anwendungsbeispiel einer Lehrstellenbörse entwickelt und prototypisch implementiert.
Kolloquium: 28.09.2011
Betreuer: Dipl.-Inform. Ingo Boersch, Dipl.-Inform. Dirk Wieczorek (]init[)
Download: A1-Poster
 Matching und Visualisierung von Points of Interest aus sozialen Daten
Matching und Visualisierung von Points of Interest aus sozialen Daten
Ziel der Bachelorarbeit ist eine Untersuchung zu Möglichkeiten der gegenseitigen Abbildung nutzergenerierter interessanter Orte (POI) aus drei sozialen Netzwerken mit Orten aus dem Openstreetmap-Projekt. Die Ansätze sollen prototypisch implementiert und die Matching-Ergebnisse visualisiert und evaluiert werden.
In der Arbeit werden verschiedene Algorithmen oder Kombinationen jener Algorithmen gegenüber gestellt und deren Vor- und Nachteile erörtert. Ferner wird auch darauf eingegangen, welche Fehler bei bestimmten Abläufen auftreten und wodurch sie provoziert werden. Nach dem Matching muss bestimmt werden, wie der resultierende PoI am Ende repräsentiert werden soll, seine kanonische Repräsentation. Die Paare von PoIs sollen dann über einen Webservice verfügbar sein. Zur Veranschaulichung der Ergebnisse werden die PoIs in einer Android-App auf einer Google-Maps-Karte visualisiert, die die Daten von dem Webservice bekommt.
Kolloquium: 21.09.2011
Betreuer: Dipl.-Inform. Ingo Boersch, Dr. Tatjana Scheffler (Deutsches Forschungszentrum für Künstliche Intelligenz GmbH)
Download: A1-Poster, Bachelorarbeit
 Kontext-spezifische Analyse von Benutzerpräferenzen mittels Clustering
für Musikempfehlungen auf Grundlage von Semantic-Web-Metadaten
Kontext-spezifische Analyse von Benutzerpräferenzen mittels Clustering
für Musikempfehlungen auf Grundlage von Semantic-Web-Metadaten
In dieser Masterarbeit wird ein Verfahren vorgestellt, mit dem Benutzerprofile extrahiert werden können, die als Basis für Musikempfehlungen genutzt werden können. Um dieses Ziel zu erreichen werden die Künstler, die ein Nutzer gehört hat, mit Metadaten beschrieben, die im Semantic-Web gefunden werden können.
Nach der Vorverarbeitung der Daten beginnt das Clustering der Künstler. Dadurch werden sie anhand ihres Musikstils in unterschiedliche Cluster unterteilt. Für jedes dieser Cluster wird dann ein Label gewählt, mit dem die zugrunde liegende Musikrichtung beschrieben werden kann. Diese Labels formen dann ein Benutzerprofil, welches ein breites Spektrum des Musikgeschmacks eines Nutzers widerspiegelt.
Durch die Evaluation kann gezeigt werden, dass die extrahierten Benutzerprofile spezifisch für die unterschiedlichen Musikrichtungen der Nutzer sind. Somit können sie als Basis für Empfehlungssysteme dienen, oder in bereits bestehende Anwendungen integriert werden.
Kolloquium: 25.08.2011
Betreuer: Prof. Dr.-Ing. Jochen Heinsohn, Dipl.-Inf. Rafael Schirru (DFKI GmbH), Dipl.-Inform. Ingo Boersch
Download: A1-Poster, Masterarbeit
 Nutzeridentifikation im Internet: Evaluation von Abwehrstrategien
Nutzeridentifikation im Internet: Evaluation von Abwehrstrategien
Ziel dieser Arbeit ist es zunächst den aktuellen Stand der Technik im Bereich der Nutzeridentifikation zu untersuchen, um im Folgenden Abwehrmaßnahmen gegen die verschiedenen Methoden der Nutzeridentifikation im Internet bewerten zu können.
Nach aktuellem Stand der Technik verfügen moderne Browser bereits über Möglichkeiten verschiedene Identifikationsmöglichkeiten abzuwehren. Es ist jedoch eine Tatsache, dass eine einzige Lücke in dieser Abwehr es ermöglichen kann, den Nutzer wiederzuerkennen, wodurch die anderen Abwehrmaßnahmen ihren Sinn verlieren.
Die Abwehrtechnologien der am stärksten verbreiteten Browser sollen deshalb überprüft werden. Es wird ebenfalls geprüft, ob sich die Abwehrfunktionen der Browser durch eine sinnvolle Auswahl von Plugins und Zusatzprogrammen verbessern lassen. Zur Durchführung der Tests ist eine eigene Testseite zu implementieren, die bekannte eindeutige Identifikationsmechanismen unterstützt. Die Testseite soll außerdem eine Selbstkontrolle ermöglichen, sodass Internetnutzer ihre eigene Abwehr kontrollieren können.
Ein ergänzender Test der 50 am stärksten frequentierten Webseiten soll zeigen, ob die Webseiten trotz Abwehrmaßnahmen noch funktionieren. Dieser Test dient vor allem dazu die Einschränkungen im Komfort, die ein Nutzer durch die Nutzung von Abwehrmaßnahmen hinnehmen muss, einschätzen zu können.
Kolloquium: 24.08.2011
Betreuer: Prof. Dr. Barbara Wiesner, Dipl.-Inform. Ingo Boersch
Download: A1-Poster, Masterarbeit
 Konzeption eines autonomen Segelboots und Realisierung eines
Reaktions-Prototyps
Konzeption eines autonomen Segelboots und Realisierung eines
Reaktions-Prototyps
Ziel der Arbeit ist der Entwurf eines autonomen Segelbootes und die Erstellung eines ersten Reaktionsprotypen. Die besondere Schwierigkeit des Themas liegt in der Vielzahl zu treffender missionskritischer Einzelentscheidungen, die ein Verständnis des Gesamtsystems als autonomer Roboter voraussetzt.
Eine Anforderungsanalyse soll zeigen, welche Komponenten für ein autonomes Agieren eines Segelboots notwendig sind und wie sie in das Gesamtsystem eingegliedert werden. Dabei ist eine sorgfältige Auswahl der Komponenten zu treffen, wobei besonderes Augenmerk auf Kriterien wie zum Beispiel Platzbedarf, Gewicht oder Stromverbrauch gelegt wird, da in diesen Bereichen Beschränkungen mit der Verwendung eines Segelboots einher gehen. Nachfolgend muss jede Komponente einzeln auf ihre Funktionalität getestet werden. Bei den der Sensorik oder Aktorik angehörenden Bauteilen muss sichergestellt sein, dass über eine Schnittstelle auf die zur Verfügung gestellten Messwerte zugegriffen bzw. Steuerbefehle an sie übergeben werden können. Anschließend sollen alle Komponenten in geeigneter Form miteinander verbunden und im Segelboot untergebracht werden, wobei auf Wechselwirkungen zu achten ist, welche die Komponenten in ihrer Funktion einschränken könnten.
Wichtig ist außerdem die Realisierung einer hardwarebasierten Fallback-Möglichkeit, sodass im Notfall eingegriffen werden kann und von autonomer zu manueller Steuerung gewechselt werden kann. Schließlich soll es ein zentral im Hauptcontroller ausgeführtes Programm ermöglichen, alle von den Sensoren gelieferten Messwerte abzufragen und auszugeben, Steuerbefehle an die Aktoren zu senden und auf eventuelle Eingaben eines Benutzers zu reagieren.
Kolloquium: 11.03.2011
Betreuer: Prof. Dr. Jochen Heinsohn, Dipl.-Inform. Ingo Boersch
Download: A1-Poster, Diplomarbeit
 Funktionale Programmierung mit F# und Microsoft Accelerator am Beispiel
Bildverarbeitung
Funktionale Programmierung mit F# und Microsoft Accelerator am Beispiel
Bildverarbeitung
Die Arbeit präsentiert Funktionale Programmierung im Allgemeinen durch Schilderung deren grundlegender Konzepte und im Speziellen durch Präsentation der Funktionsweise der Sprache F#. Zusammen mit Vorstellung der Bibliothek Accelerator, die ein gleichartiges Programmiermodell verfolgt, und der Umsetzung von Beispielen aus Bildverarbeitung auf niedrigerer Ebene bei Ausnutzung von Datenparallelität, wird die Anwendung dieser Techniken in einer Demonstrationssoftware vorgezeigt.
Kolloquium: 23.11.2010
Betreuer: Prof. Dr. sc. techn. Harald Loose, Dipl.-Inform. Ingo Boersch
Download: A1-Poster, Bachelorarbeit
 Konzeption und Implementierung eines Multitouch-Informationssystems
Konzeption und Implementierung eines Multitouch-Informationssystems
Ziel der Arbeit ist die Konzeption und Entwicklung eines prototypischen Informationssystems basierend auf dem Multitouchtisch Touchmaster von ART+COM zur Darstellung und zum Retrieval realer Mitarbeiter-Projekt-Beziehungen im Berliner Projektbüro des DFKI.
Schwerpunkt ist hierbei die Diskussion von Interaktions- und Visualisierungskonzepten für Multitouchtische unter Berücksichtigung der gleichzeitigen Bedienung durch mehrere Personen. Die Applikation soll die konventionelle Maus- und Tastatursteuerung, sowie das Fensterparadigma vermeiden und stattdessen eine intuitive Interaktion über Gesten und Physiksimulation ermöglichen.
Kolloquium: 06.10.2010
Betreuer: Dipl.-Inform. Ingo Boersch, Dipl. Inform.(FH) Kinga Schumacher (Deutsches Forschungszentrum für Künstliche Intelligenz GmbH)
Download: A1-Poster
 Aufbau der Informationsverarbeitung und Evaluierung eines neuartigen
Sensorsystems zur Positionsbestimmung von kontinuierlich und
quasi-kontinuierlich gearteten Roboterkinematiken
Aufbau der Informationsverarbeitung und Evaluierung eines neuartigen
Sensorsystems zur Positionsbestimmung von kontinuierlich und
quasi-kontinuierlich gearteten Roboterkinematiken
Ziel der Arbeit ist eine Applikationsentwicklung für ein verteiltes Sensorsystem.
Hierzu ist Kommunikation zwischen Mikrocontroller und Sensoren über I2C und zum PC über CAN-Bus zu entwerfen und umzusetzen. Weiterhin soll eine Vorverarbeitung der Messwerte im Mikrocontroller (Nullpunktabgleich) sowie auf dem PC zur Positionsberechnung entwickelt werden. Die Funktion des Systems soll durch geeignete Tests nachgewiesen werden.
Kolloquium: 28.09.2010
Betreuer: Dipl.-Inform. Ingo Boersch, Dipl.-Ing. Roland Behrens (Fraunhofer-Institut für Fabrikbetrieb und -automatisierung IFF)
Download: A1-Poster

Die Arbeit beschäftigt sich mit der Integration von Data-Mining-Methoden, die zur Analyse der Daten aus dem astrophysikalischen Experiment LOPES benutzt werden können. Den Hauptteil der Arbeit bilden die Implementierung und Beschreibung der Software, welche die vorgenannte Integration durchführt. Der erste Teil dieser Beschreibung besteht aus der Analyse der Anforderungen an die Software zusammen mit der notwendigen Theorie der verwendeten Data-Mining-Methoden. Der zweite Teil ist eine Software- Engineering-orientierte Darstellung der implementierten Lösungen. Da die interessierte Leserschaft sowohl aus Informatikern als auch Physikern besteht, beginnt die Arbeit mit der allgemeinen Vorstellung des LOPES-Experiments und den Grundideen des Data Mining.
Kolloquium: 26.08.2010
Betreuer: Prof. Dr. Jochen Heinsohn (FHB), Prof. Dr. Johannes Blümer (Karlsruher Institut für Technologie)
Download: A1-Poster Masterarbeit
 Optimierung und Evaluierung einer Routenabgleichkomponente in einer
Ad-Hoc-Mitfahrerzentrale
Optimierung und Evaluierung einer Routenabgleichkomponente in einer
Ad-Hoc-Mitfahrerzentrale
Ziel dieser Arbeit ist das Testen und Überarbeiten eines bestehenden Mitfahrersuchalgorithmus, der vom Fraunhofer Institut für offene Kommunikationssysteme entwickelt wird.
Mit dem Algorithmus werden passende Mitfahrgesuche für einen Fahrer ermittelt, wobei die Lösung bei Kurzstrecken zum Einsatz kommen soll. Es gilt herauszufinden, unter welchen Bedingungen, wie viele Mitfahrer, in welcher Zeit, für den Fahrer gefunden werden. Weiterhin werden alternative Ansätze entwickelt und miteinander verglichen.
Kolloquium: 12.05.2010
Betreuer: Dipl.-Inform. Ingo Boersch, Dipl.-Inform. A. Kress (Fraunhofer Institut für offene Kommunikationssysteme)
Download: A1-Poster

Diese Bachelorarbeit hat als Ziel, eine funktionstüchtige Softwarekomponente zu erstellen, die die Grenzziehung unter Berücksichtigung der vorliegenden ATKIS-Grenzen durchführt und sich in die Software eConstruction einfügt. Dabei sollen die für pixelbasierende Bilder typischen Rastermuster bei großem Zoom aus der Klassifikation elimeniert werden. Die Software eConstruction wurde in einem Förderprojekt des Landes Brandenburg und der Europäischen Union von der Firma DELPHI IMM entwickelt.
Kolloquium: 18.02.2010
Betreuer: Dipl.-Inform. Ingo Boersch, Dr. Rolf Lessing (DELPHI IMM GmbH)
Download: A1-Poster Bachelorarbeit

Die retinale Nervenfaserschichtdicke (engl.: retinal nerve fiber layer
thickness, RNFLT) ist ein moderner Parameter in der Augendiagnostik.
Mittels optischer Kohärenztomographie (engl.: optical coherence
tomography, kurz OCT) wird hierbei in einem Augen-Laserscan die
Faserdicke der Augennerven in 256 radialen Einzelmesswerten bestimmt.
Die RNFLT zeigt dabei spezifische Veränderungen in verschiedenen
Krankheitsbildern und hält zunehmend Einzug in die Routinediagnostik.
Im
Rahmen einer Studie sollen Modelle zum Vergleich der RNFLT-Veränderungen
bei Patienten mit unterschiedlichen Erkrankungen gegenüber
Kontrollmessungen bei gesunden Probanden bestimmt werden. Bisherige
Vergleichsmethoden umfassen lediglich die mittlere Abnahme der Messwerte
und berücksichtigen nicht typische Kurvenveränderungen. Im Rahmen dieser
Abschlussarbeit sollen diese Messungen zuerst elektronisch erfasst,
verarbeitet und die Auswertungen online verfügbar gemacht werden. Mit
Hilfe von Kurvenanalyse und dem Einsatz von Methoden des maschinellen
Lernens sollen genauere Lösungen für dieses Klassifikationsproblem
entwickelt werden..
Kolloquium: 25.11.2009
Betreuer: Dipl. Inform. Ingo Boersch, Master of Science Sebastian Mansow-Model (mediber GmbH)
Download: A1-Poster, Diplomarbeit
 Inbetriebnahme, Konfigurierung und Evaluation des Vorverarbeitungsmoduls
zur Segmentierung von Dialogakten mittels Pausenerkennung
Inbetriebnahme, Konfigurierung und Evaluation des Vorverarbeitungsmoduls
zur Segmentierung von Dialogakten mittels Pausenerkennung
Kolloquium: 16.11.2009
Betreuer: Prof. Dr. Jochen Heinsohn, Tatjana Scheffler, PhD (DFKI GmbH)
Download: A1-Poster

Das Ziel dieser Arbeit ist es, Konzepte zu erarbeiten, welche die Umsetzung einer asynch-ronen Kommunikation zwischen Browserapplikation und dem Webio-Server ermöglichen. Die verschiedenen Varianten sind zu untersuchen, um eine Entscheidung für die praktische Umsetzung zu treffen. Danach gilt es die Anforderungen für eine Software zu ermitteln, welche die Steuerung und die ereignisbezogene Visualisierung eines industriellen Prozes-ses ermöglicht. Nach diesen Anforderungen wird ein Prototyp der Software entwickelt, welcher zur Erprobung des praktischen Einsatzes dient.
Kolloquium: 26.10.2009
Betreuer: Dipl.-Inform. Ingo Boersch, Dipl.-Ing. Eckehart Gemmel (Systemhaus Brandenburg GmbH)
Download: A1-Poster
Zielstellung der Arbeit ist ein wertender Überblick über Entwicklungstendenzen des Semantic Web. Hierzu sind der Stand der Technik und die Triebkräfte mit Bezug auf mögliche Einsatzszenarien darzustellen. Die grundsätzlichen Probleme wie Wissensrepräsentation (bspw. Konsistenz, Unschärfe, Unsicherheit, Mehrdeutigkeit), Quelle der Semantik, semantische Interoperabilität und andere sind zu vertiefen und aktuelle Lösungsansätze aufzuzeigen. Beide Teile sind durch aussagekräftige, computergestützte Beispiele zu untersetzen. Abschließend sollen möglichst konkrete Prognosen über die mittelfristige Entwicklung des Semantic Web formuliert werden.
Kolloquium: 28.08.2009
Betreuer: Professor Dr.-Ing. Thomas Preuss, Dipl.-Inform. Ingo Boersch

Das Ziel der Arbeit ist für ein Lager eine Auslagerungs-Strategie umzusetzen bzw. zu modifizieren, sodass die zu fahrende Gesamtroute für eine Auslagerung bestimmter Produkte so kurz wie möglich ist. Die einzige Nebenbedingung ist, dass der Lagerschlitten, also die Einheit, die für das Greifen der Produkte zuständig ist, für eine Tour nur eine bestimmte Anzahl an Produkten aufnehmen kann. Erst nachdem die aufgenommenen Güter dann an einem definierten Ort abgelegt wurden, kann eine weitere Tour gestartet werden. Abbruchbedingung für die Berechnung der Route kann eine bestimmte Zeit sein, welche vorher definiert wird.
Zusätzlich ist es wichtig zu analysieren, wie effektiv bekannte Verfahren sind und ob diese hinsichtlich des speziellen Problems noch optimiert werden können. Ziel der Diplomarbeit ist die Entwicklung und Umsetzung einer Auslagerungsstrategie für eine Lagerverwaltung. Hierbei sollen Aufträge zur Auslagerung von Gütern angenommen, eine kurze Route berechnet und ein reales Lagermodell angesteuert werden. Der theoretische Schwerpunkt liegt hierbei auf der Einordnung des Routingproblems und der Auswahl eines geeigneten Optimierungsverfahrens. Das Verfahren soll in eine funktionsfähige Applikation umgesetzt werden, welche die Planungskomponente als Modul enthält, sowie eine Visualisierung des Planungsprozesses und der erstellten Routen vornimmt. Die Funktionalität und Geschwindigkeit ist durch geeignete Experimente nachzuweisen.
Kolloquium: 02.06.2009
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr.-Ing. Michael Syrjakow
Download: A1-Poster, Diplomarbeit

Aufgabe ist es, eine Anwendung für die Firma DELPHI IMM GmbH zu entwickeln, die geometrische und semantische Unterschiede von Geodatensätzen aus verschiedenen Objektartenkatalogen für Landbedeckung- und Landnutzungsdaten aufzeigt und dabei die semantische Interoperabilität berücksichtigt.
Als Ausgangsdaten dienen zum einen ein ATKIS Basis-DLM Datensatz und zum anderen ein aus aktuellen Satellitenbildern klassifizierter DeCOVER-Ausgangsdienst (DeCOVER-AD) Datensatz. Anhand dieser Ausgangsdaten soll die Anwendung entwickelt und geprüft werden. Beide Datensätze liegen jeweils im Shape-Format vor. Die Nomenklatur der Landbedeckung und Landnutzung in beiden Formaten steht in einer n:m-Beziehung und wird durch eine Ähnlich-keitsrelation für die Arbeit bereitgestellt.
Das Ziel der Anwendung ist es eine Voraussetzung zu schaffen, um Landbedeckungs- und Landnutzungsdaten mit Hilfe von Ergebnissen auf Basis von Fernerkundungsdaten,
Kolloquium: 29.10.2008
Betreuer: Dipl.-Inform. Ingo Boersch, Dr. Rolf Lessing (DELPHI IMM GmbH)
Download: A1-Poster

Zielstellung des Themas ist die Untersuchung der Anwendbarkeit von Methoden des Data Mining zum Finden und Modellieren von Abhängigkeiten der an fertigen Solarmodulen gemessenen Größen von den Parametern und Messwerten des Produktionsprozesses. Die auszuwertenden Daten liegen dabei zu Beginn der Arbeit im Wesentlichen als Tabelle vor.
Die Arbeit umfasst in einem ersten Teil die Einordnung der Aufgabenstellung in den wissenschaftlichen Kontext und das Umfeld beim Hersteller, die notwendige Datenvorbereitung (bspw. geeignete Behandlung von fehlenden Werten, Normalisierung, Diskretisierung, Selek-tion und Aggregation von Merkmalen), die Formulierung und Test einfacher Hypothesen (bspw. statistische Abhängigkeit), Darstellung von Werten der deskriptiven Statistik (bspw. Quartile im Boxplot, Scatterplots, Histogramme) und der Korrelation.
Darauf aufbauend soll im zweiten Teil versucht werden, Abhängigkeiten automatisch zu modellieren und über Kreuzvalidierung zu bewerten. Hierbei ist datengetrieben eine geeignete, möglichst transparente (menschenlesbare) Wissensrepräsentation auszuwählen. Als Anre-gung seien hier Entscheidungsbäume, Regelsysteme, künstliche neuronale Netze und Ent-scheidungslisten genannt. Die Arbeit soll konkrete Wege zur Fortführung der Datenanalyse aufzeigen.
Die besondere Schwierigkeit der Arbeit liegt in der unbekannten Datenqualität, dem Umfang der Daten und insbesondere der Breite des Themas. Zur Verwendung werden Weka, Ra-pidMiner, Gnuplot, Excel, R und Matlab empfohlen.
Kolloquium: 02.10.2008
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr.-Ing. Jochen Heinsohn, Christian Kneisel
Download: A1-Poster

Ziel der Arbeit ist die Entwicklung einer Anwendung, die mit Hilfe von überwachtem Lernen und Bildverarbeitung, die von einer Kamera aufgenommenen Objekte erkennt und diese einer Klasse zuordnet. Das Trainieren des Klassifikators soll unter Verwendung einer einfach bedienbaren, grafischen Benutzeroberfläche durchgeführt werden können. Der Anwender hat die Aufgabe, die vom System vorgeschlagene Klassifizierung zu bewerten und gegebenenfalls zu korrigieren. Die während des Trainings entstehenden Klassifikatormodelle sollen dem Anwender dargestellt werden können.
Kolloquium: 29.09.2008
Betreuer: Prof. Dr. F. Mündemann, Dipl.-Inform. I. Boersch
Download: A1-Poster
Für die Abstimmung der Anlage sind wiederholende Vermessungen der Profile der Target-Erosionszonen notwendig. Die Erfassung der Profile erfolgt mit einer Konturlehre, wobei die Kontur anschließend erfasst und vermessen werden muss. Um die bisherige manuelle Vermessung zu substituieren, sollte in dieser Arbeit die Vermessung automatisiert werden. Dazu war ein Ansatz mit Methoden der Bildverarbeitung vorgegeben. Ein Versuchsstand sollte im Bildverarbeitungslabor aufgebaut, ein Algorithmus zur Bilderfassung, Bildverbesserung und Bildauswertung sollte entwickelt und getestet sowie Parameter wie minimale und maximale Höhe der Kontur, die verbleibende Fläche unter den Profilen berechnet und die Konturlinie mit Polynomen approximiert werden
Kolloquium: 15.09.2008
Betreuer: Prof. Dr. sc. techn. Harald Loose, Dipl.-Inform. Ingo Boersch

Zielsetzung der Arbeit ist die selbständige Navigation eines simulierten Roboters vom Typ Pioneer in einer vom Anwender erstellten Karte durch Zuweisung von Zielpunkten. Schwerpunkt der Arbeit ist die Diskussion von Verfahren zur Pfadplanung, sowie die prototy-pische Umsetzung einer Methode zur exakten Zerlegung des Freiraumes mit anschließender Pfadsuche im resultierenden Graphen. Besonderer Wert wird hierbei auf die Darstellung der Verarbeitungsschritte von der internen Karte bis zur Folge der Wegpunkte gelegt. Die gefun-denen Wegpunkte sind unter der Annahme fehlerfreier Aktorik und Sensorik in der Simulati-on abzufahren, eine eigene Registrierung ist nicht notwendig. Als Systemumgebung soll Saphira mit dem zugehörigen Simulator genutzt werden. Notwen-dig ist dafür eine Anbindung der Planungs- und Steuerungskomponente an bzw. in Saphira. Die Erstellung der internen Karte des Roboters und der korrespondierenden simulierten Um-welt kann durch eine Applikation unterstützt werden. Die Funktionsfähigkeit des Gesamtsys-tems ist durch geeignete Experimente nachzuweisen.
Kolloquium: 29.08.2008
Betreuer: Dipl.-Inform. I. Boersch, Prof. Dr.-Ing. J. Heinsohn
Download: A1-Poster, Diplomarbeit

Ziel der Arbeit ist die Untersuchung der Anwendbarkeit von interaktiver Fitness zur Verbesserung von Cascading Style Sheets durch subjektive Nutzerbewertung in einem evolutionären Optimierungsprozess. Ausgehend von der Fitnessbestimmung in evolutionären Algorithmen sind die Anwendungsindizien, Probleme und insbesondere mögliche Interaktionsvarianten mit dem menschlichen Bewerter darzustellen.
Kolloquium: 29.08.2008
Betreuer: Dipl.-Inform. I. Boersch, Prof. Dr. J. Heinsohn
Download: A1-Poster, Bachelorarbeit

Ziel dieser Arbeit ist der Entwurf und die Implementierung eines 3D-Modells des mobilen Sicherheitsroboters MOSRO für die Gazebo- Simulationsumgebung. Die in diesem Modell verwendeten Sensoren und Aktoren sollen realistisch modelliert und deren Schnittstellen in das Sensor-/Aktorkonzept der Robowatch Technologies GmbH integriert werden.
Alle implementierten Sensoren (Ultraschall, Infrarot, Passiv-Infrarot, Radar und Gyroskop) sind sowohl innerhalb des MOSRO-Modells, als auch separat als Plugins zu implementieren, damit sie auch für zukünftige Robotermodelle genutzt werden können.
Zum Testen und Demonstrieren der Simulation sollen zudem die Robowatch-Räumlichkeiten als Umgebungsmodell für die Simulation bereitgestellt werden. Ein einfaches Programm soll den Roboter in dieser Umgebung steuern und die Räume auf Personen überprüfen.
Kolloqium: 28.04.2008
Betreuer: Dipl.-Inform. Ingo Boersch, Dipl.-Inform. M. Willers (Robowatch Technologies GmbH)
Download: A1-Poster

Selbstorganisierende Karten stellen eine besondere Form von künstlichen neuronalen Netzen dar, die sich unüberwacht trainieren lassen. Ziel der Arbeit ist die Konzeption und Implementierung einer Anwendung zum Training von selbstorganisierenden Karten. Schwerpunkt ist hierbei die Darstellung des Lernverlaufs und die Visualisierung der Karte.
Ausgangspunkt der Arbeit sei die vorhandene Applikation SOMARFF [Sch06], die in ihrem Funktionsumfang zu analysieren ist. Die neue Applikation soll den bestehenden Funktionsumfang in den Bereichen Datenvorverarbeitung, Training und Visualisierungen übernehmen und weitere Visualisierungen, wie „P-Matrix“ oder „Karte im Eingaberaum“ enthalten. Zusätzlich soll der Quantisierungsfehler geeignet dargestellt werden.
Wesentliche Eigenschaften selbstorganisierender Karten sollen abstrahiert und austauschbar gestaltet werden, um es zu ermöglichen, neue Topologien, Distanzmetriken, Datenquellen und Nachbarschaftsfunktionen zu integrieren. Besonderer Wert wird dabei auf die Wiederverwendbarkeit von Modulen und Erweiterbarkeit durch neue Module gelegt. Bestandteil der Arbeit ist weiterhin eine aussagekräftige Dokumentation des Systems für Entwickler, eine Nutzeranleitung und der Nachweis der Funktionsfähigkeit des Programms durch geeignete Experimente.
Kolloqium: 31.08.2007
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr.-Ing. Jochen Heinsohn
Downloads: A1-Poster Diplomarbeit Applikation Sombrero.zip (84MB)

Ziel der Arbeit ist die Untersuchung einer automatischen Erzeugung von Bewegungsmustern für gegebene Robotermorphologien am Beispiel des ELFE-Laufroboters. Hierzu ist der Stand der Forschung auf dem Gebiet des maschinellen Lernens sensomotorischer Rückkopplungen mit Gütefunktional, die möglichen Repräsentationen von Bewegungsmustern und deren Lernalgorithmen im Überblick darzustellen.
Der Schwerpunkt der Arbeit liegt in der Untersuchung der Anwendung von Evolutionären Algorithmen, insbesondere Genetischem Programmieren auf die Problemstellung. Die gewonnenen Erkenntnisse sind in ein prototypisches System mit einem realen Roboter umzusetzen. Hierbei ist auf Modularisierung und die Möglichkeit zur Weiterentwicklung Wert zu legen. Wenn möglich, sollten Hypothesen über den Evolutionsverlauf am realen System aus einer Simulation abgeleitet und im Experiment evaluiert werden.
Abgabe: 29.11.2006 Kolloqium: 18.12.2006
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr.-Ing. Jochen Heinsohn
Downloads: Diplomarbeit A1-Poster

Ziel der Arbeit ist die Entwicklung eines Verfahrens zur Extraktion biometrischer Merkmale von Gesichtern aus Bildern, die mit einer Webcam aufgenommen wurden. Hierzu ist als Entwicklungssystem MATLAB mit der Image Processing Toolbox zu verwenden. Auf den erzeugten Mustervektoren ist eine geeignete Klasseneinteilung zu definieren und die Beispielbilder zu klassifizieren.
Abgabe: 17.08.2006 Kolloqium: 26.08.2006
Betreuer: Prof. Dr. sc. techn. Harald Loose, Dipl.-Inform. Ingo Boersch
Downloads: A1-Poster

Ziel der Arbeit ist die Entwicklung eines Verfahrens zur Extraktion biometrischer Merkmale aus stan-dardisierten Passbildern mit Frontalansicht. Hierzu ist als Entwicklungssystem MATLAB mit der Image Processing Toolbox zu verwenden. Auf den erzeugten Mustervektoren ist eine geeignete Klassenein-teilung zu definieren und die Beispielbilder zu klassifizieren.
Abgabe: 17.08.2006 Kolloqium: 26.08.2006
Betreuer: Prof. Dr. sc. techn. Harald Loose, Dipl.-Inform. Ingo Boersch
Downloads: A1-Poster

Ziel der Arbeit ist die Untersuchung von Visualisierungsmöglichkeiten von Daten mit Hilfe von Selbstorganisierenden Karten. Hierbei sind sowohl musterbezogene als auch musterunabhängige Varianten zu betrachten. Die Verfahren sollen prototypisch in ein Programmsystem umgesetzt werden, welches ohne Installation über das Netz nutzbar ist. Der Lernprozess ist geeignet darzustellen.
Hierzu sind Selbstorganisierende Karten im theoretischen Überblick zu beleuchten und für den Schwerpunkt Visualisierung trainierter Karten zu vertiefen. Anhand der im Verlauf der Diplomarbeit erzielten praktischen und theoretischen Erkenntnisse soll eine Bewertung und Systematisierung der Visualisierungsvarianten erstellt werden. Dabei sollen Aspekte wie Lesbarkeit, Informationsgehalt, Umsetzungskomplexität und andere Kriterien beurteilt werden.
Abgabe: 03.03.2006 Kolloqium: 07.04.2006
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr.-Ing. Jochen Heinsohn
Downloads: A1-Poster Diplomarbeit Vortrag

Um ein Gesicht in einem Bild automatisch zu verarbeiten (Identifikation, Verifikation usw.), ist es notwendig zu wissen, ob und wo sich ein Gesicht im Bild befindet. Dieser als Gesichtsdetektion bezeichnete Vorgang kann mit verschiedenen Ansätzen realisiert werden.
In dieser Arbeit sollte ein Verfahren entwickelt werden, welches Gesichtsmerkmale (Augen, Nase und Mund) in Einzelbildern detektieren kann. Das Gesicht sollte sich dabei in der Frontalansicht befinden und beliebig positioniert, skaliert und rotiert sein dürfen. Weiterhin sollte eine beliebige Anzahl desselben Gesichtsmerkmals (z.B. des rechten Auges) erlaubt und das Verfahren Beleuchtungsinvariant sein.
Um das gesamte Gesicht zu detektieren, müssen die einzelnen Gesichtsmerkmale anschließend kombiniert werden, was jedoch nicht Gegenstand dieser Arbeit war.
Abgabe: 08.11.2005 Kolloqium: 07.12.2005
Betreuer: Prof. Dr. rer. nat. Friedhelm Mündemann, Dipl.-Inform. Ingo Boersch
Downloads: Diplomarbeit A!-Poster

Computer vision is a computer science field belonging to artificial intelligence. The purpose of this branch is allowing computers to understand the physical world by visual media means. This document proposes an artificial neural network based face detection system. It detects frontal faces in RGB images and is relatively light invariant.
Problem description and definition are enounced in the first sections; then the neural network training process is discussed and the whole process is proposed; finally, practical results and conclusions are discussed. Process has three stages: 1) Image preprocessing, 2) Neural network classifying, 3) Face number reduction. Skin color detection and Principal Component Analysis are used in preprocessing stage; back propagation neural network is used for classifying and a simple clustering algorithm is used on the reduction stage.
Abgabe: 12.09.2005
Betreuer: Dipl.-Inform. Ingo Boersch
Downloads: Studienarbeit

Relating to this text
During the last years of my career, the main intention of my work has been to apply neural networks to several fields of my interest, mainly networking security and biomedicine. As Dr. Carmen Paz Suárez Araujo’s, from University of Las Palmas de Gran Canaria (Spain), and Prof. Ingo Boersch’s, from Fachhochschule Brandenburg (Germany), undergraduate student I have learned how important the neurocomputing is becoming in nowadays engineering tasks. Through this path, I have gathered a variety of ideas and problems which I would have appreciated to be written or explicitly available for my personal reading and further understanding.
The employment of a simulator to develop first stage analysis and to plan further work is a must in the engineering discipline. My aim in the development of this brief textbook has been to compose a little, but well condensed manual, where the reader can get the point of self organized networks, and moreover, of Kohonen Self Organized Maps, SOM. Using JNNS, the reader will be able to apply the theoretical issues of
Kohonen networks into practical and real development of ideas.
This brief textbook is oriented to those with little experience in self organization and Kohonen networks, but also to those interested in using and analyzing the deployment of solutions with the Java Neural Network Simulator, JNNS.
Abgabe: 07.09.2005
Betreuer: Dipl.-Inform. Ingo Boersch
Downloads: Studienarbeit Patternfiles.zip

Ziel der Arbeit ist die Anwendung von Agentensystemen auf die Diagnose einer fahrzeuginternen Funktion. Es sollen mit Hilfe der Agenten Fehler im Ablauf der Funktion erkannt und ihre Ursache so weit wie möglich eingegrenzt werden. Am Ende der Diagnose soll eine Aussage vorliegen, welches Bauteil der tatsächliche Verursacher des Fehlverhaltens war.
Hierzu sind Agentensysteme im theoretischen Überblick zu beleuchten und für den Schwerpunkt Diagnose zu vertiefen.
Beispielhaft soll ein Agentensystem für die Diagnose der Heckdeckelfernschließung (HFS) entwickelt werden. Hierzu werden die Funktion der Heckdeckelfernschließung untersucht und diagnoserelevante Aspekte herausgefiltert. Unter Verwendung dieser Vorbetrachtungen (Analyse) wird ein Entwurf für ein Diagnosesystem der HFS erstellt (Design), der vielversprechende agentenspezifische Methoden einsetzt. Mittels einer ausgewählten Agentenplattform soll der Entwurf prototypisch umgesetzt werden.
Anhand der im Verlauf der Diplomarbeit erzielten praktischen und theoretischen Erkenntnisse wird eine Bewertung von Agentensystemen für die Diagnose verteilter komplexer Systeme im Fahrzeug angestellt. Dabei Werden Aspekte wie die Flexibilität und Strukturierbarkeit der angewendeten Agentenstrukturen, deren erzielbare Diagnoseschärfe sowie die notwendigen Aufwände für die Implementierung und die Adaption betrachtet.
Abgabe: 16.08.2005 Kolloqium: 31.08.2005
Betreuer: Dipl.-Inform Ingo Boersch, Dipl.-Ing. André Fischer (DaimlerChrysler AG)
Downloads: A1-Poster

With the growth of computer networks in the recent years, security has become a crucial aspect in modern computer systems. An adequate way to detect systems misuse is based on monitoring users’ activities and network traffic. Several intrusion detection methods have been proposed but they result in an expensive implementation and doubtful yield.
In this paper, it is analyzed an approach based on the application of non-supervised auto-organizing artificial neural networks to improve the performance of real-time intrusion detection systems.
Abgabe: 08.07.2005
Betreuer: Dipl.-Inform. Ingo Boersch
Downloads: Studienarbeit

Ziel dieser Arbeit ist die Darstellung und der Vergleich verschiedener Hindernisumfahrungsstrategien, sowie die Konzeption und Implementierung einer Kollisionsvermeidungs- und Hindernissumfahrungsstrategie für den Wachschutzroboter Mosro.
Da der Roboter den Überwachungsweg in einer statischen Umgebung zurücklegt, können dynamische Objekte bei der Umfahrung vernachlässigt werden. Die Hindernisumfahrung soll möglichst einfach und in der Praxis einsetzbar sein, dabei aber die bauartbedingten Eigenschaften des Roboters berücksichtigen.
Abgabe: 07.03.2005 Kolloqium: 30.03.2005
Betreuer: Prof. Dr. sc. techn. Harald Loose, Dr. Jens Hanke, Robowatch Technologies

Es ist zu untersuchen, welche Bestandteile für ein Autonomes Mobiles System notwendig sind und wie diese zusammenwirken. Auf Grund dieser Analysen ist ein autonomer, mobiler Roboter mit modularen, erweiterbaren und vielseitig verwendbaren Bestandteilen zu bauen. Auftretende Schwierigkeiten in der Entwicklung sind anzuführen und in allgemeingültigen Lösungsansätzen zu beschreiben.
Weiter ist zu untersuchen, welche Eigenschaften bzw. Skills ein AMS besitzen soll. Diese Skills sind zu implementieren und in die Bibliothek des AKSEN-Boards aufzunehmen. Traditionelle Ansätze zur Roboterprogrammierung, wie Weltenmodellierung oder Subsumtionsarchitektur, sind zu beleuchten.
In einem Tutorium sind an Hand des zu entwickelnden universalen, flexiblen Vehikels die Bestandteile und die zu einem komplexen Verhalten zusammengefassten, vorimplementierten Skills zu erklären. In umfangreichen Tests sollen Funktionsweise, Einfachheit und Robustheit aller Komponenten verifiziert werden.
Abgabe: 18.01.2005 Kolloqium: 31.01.2005
Betreuer: Prof. Dr. sc. techn. Harald Loose, Dipl.-Inform Ingo Boersch
Downloads: A1-Poster Diplomarbeit Vortrag

Ziel der Arbeit ist eine Untersuchung zur automatischen Erstellung von Objektbeschreibungen aus vorgegebenen Quellbildern.
Die Objektbeschreibung erfolgt in Form von L-Systemen, die passend zu Quellbildern erzeugt werden. Hierzu wird ein evolutionärer Prozeß auf die L-Systeme angewendet. Fitnessfunktion sei die Übereinstimmung der Ansichten der erzeugten L-Systeme aus verschiedenen Kameraperspektiven mit den Originalbildern eines einfachen Gegenstandes.
Die Arbeit soll die theoretischen Grundlagen dieses Ansatzes darlegen (insbesondere Einordnung und Klassifizierung von L-Systemen und ihre Evolutionsmöglichkeiten), eine Systemarchitektur vorschlagen und in Teilen prototypisch implementieren.
Bei der Implementation soll besonderer Wert auf die Weiternutzbarkeit der erstellten Module und die Definition externer Schnittstellen gelegt werden. Die Funktionsfähigkeit des Systems ist durch geeignete Teststellungen zu evaluieren.
Abgabe: 14.06.2004 Kolloqium: 29.06.2004
Betreuer: Prof. Dr. rer. nat. Friedhelm Mündemann, Dipl.-Inform. Ingo Boersch
Downloads: A1-Poster Diplomarbeit Vortrag

Bei der SAFE Wachschutz / Allservice Brandenburg GmbH ist man daran interessiert, die Tourenplanung für das Wachpersonal so effektiv wie möglich zu gestalten, um Zeit und Kosten zu sparen.
Das Problem stellt sich wie folgt dar: ausgehend von einem zentralen Fahrzeugdepot müssen mehrere Kunden (Wachobjekte) angefahren und kontrolliert werden. Dazu stehen im Depot mehrere Fahrzeuge zur Verfügung.
Ziel ist es, die verschiedenen Kunden auf mehrere Routen so aufzuteilen, dass die dafür benötigte Zeit und Gesamtstrecke möglichst minimal werden. Die Planung der einzelnen Touren soll durch ein rechnergestütztes Verfahren vorgenommen werden. Dazu ist eine Software-Lösung zu erstellen, welche die individuellen Anforderungen des Problems in geeigneter Art und Weise abbildet und unter Berücksichtigung sämtlicher Restriktionen möglichst effiziente Routen ermittelt.
Teilaufgaben:
Das Programm soll an einem konkreten Beispiel (Nachtrevier Brandenburg) getestet und die Lösungen bzgl. des Zeit- und Kostenaufwands mit den bisherigen Fahrtrouten verglichen werden.
Abgabe: 04.02.2003 Kolloqium: 11.03.2003
Betreuer: Prof. Dr.-Ing. Jochen Heinsohn, Jörn Schlanert (Geschäftsführer SAFE Wachschutz / Allservice GmbH)
Downloads: Diplomarbeit A1-Poster Vortrag

Zielstellung des Themas ist die Konzeption eines Systems zur Verfolgung von Objekten in Bildfolgen. Dieses System gibt bei Anfragen an die Wissensbasis Auskunft über die möglichen Positionen der Objekte, auch wenn diese zum aktuellen Zeitpunkt von anderen Objekten verdeckt sind. Systembedingt (z.B. Verdeckung) kann die Position eines Objektes mehrdeutig sein, hierbei sind alle möglichen Positionen des Objektes unter bestimmten Randbedingungen zu verfolgen.
In der Arbeit sollen die Grundlagen für die Wissensrepräsentation räumlicher Relationen sowie des Inferenzprozesses untersucht, sowie eine Systemarchitekur für das Gesamtsystem entwickelt werden. Die Funktionalität wird über eine protoypische Implemetation der Architektur (ohne Bildaufnahme, -verarbeitung) nachgewiesen. Die Umsetzung soll besonderen Wert auf Modularisierung und Wiederverwendbarkeit legen.
Abgabe: 22.11.2002 Kolloqium: 15.01.2003
Betreuer: Prof. Dr.-Ing. Jochen Heinsohn, Dipl.-Inform Ingo Boersch
Downloads: Diplomarbeit A1-Poster Vortrag
Im Rahmen des Projektes "Initiative Intelligente Autonome Systeme" wird an der FH Brandenburg ein Kernel für intelligente autonome Systeme entwickelt. Eine Teilkomponente des R-Cube-Systems ist eine eigenständige Bildverarbeitungskarte mit StrongARM-Prozessor und ARM-Linux.
Zielstellung des Themas ist die Konzeption und Implementierung der Videodigitalisierung und Videoausgabe der Bildverarbeitungskarte. Hierbei sind Schnittstellen zum Auslesen der Bilddaten (vorzugsweise Video4Linux) und Ausgabe von Bilddaten (vorzugsweise Framebuffer-Device) zu entwickeln. Die Umsetzung soll besonderen Wert auf die mögliche Nutzung in kommenden Linux-Kernelversionen sowie die Performance der Lösung legen. Die Funktionsfähigkeit des Systems ist durch geeignete Teststellungen zu evaluieren.
Abgabe: 26.11.2002 Kolloqium: 15.01.2003
Betreuer: Dipl.-Ing. Henry Westphal (TIGRIS Elektronik GmbH), Dipl.-Inform Ingo Boersch
Downloads: Diplomarbeit A1-Poster Vortrag
Schwerpunkte:
* Bewegungsmuster (Gaits): Definition, Arten, Phasen, Beschreibungsmittel
* Geradlinige Bewegung (Beschreibung, Programmierung, Diskussion): Wave (Tripod) Gait, Follow-the-Leader Gait, Equal-Phase Gait
* Krummlinige Bewegung (Beschreibung, Programmierung, Diskussion): Turn (Drehen), Swing (Schwenken),
* Experimentelle Untersuchungen: Laufzeiten, Abhängigkeiten vom Ladezustand der Akkus, "Geradlinigkeit", Wiederholbarkeit, Reproduzierbarkeit
* Dokumentation in Form eines Films
Abgabe: 30.05.2002 Kolloqium: 02.07.2002
Betreuer: Prof. Dr. sc. techn. Harald Loose, Dipl.-Inform Ingo Boersch
Downloads: Diplomarbeit A1-Poster Vortrag

Für die Tourenplanung innerhalb der Entsorgungs- und Baubranche sollen moderne Constrainttechniken analysiert und eine Softwarebibliothek entwickelt worden. Hierzu solIte der Stand der Forschung auf den Gebieten der "Constraint-Satisfaction" und von "Constraint Systemen" einfließen und bei der Analyse der Fahrzeugplanung hinsichtlich der Anforderungen an die zu schaffende Softwarebibliothek beachtet worden.
Für die Arbeit sollten geeignete Constraint-Solver-Bibliotheken hinsichtlich des Fahrzeugroutens evaluiert und ein zweckmäßiger Constraint-Solver ausgewählt werden.
Unter Einbeziehung des gewählten Solvers stand es zur Aufgabe, eine Softwarebibliothek zu entwerfen und zu implementieren, die gegebene "Pickup and Delivery" Probleme 1öst. Die Implementierung sollte in C/C++ oder in Delphi (Objektpascal) durchgeführt werden. Dabei war zu beachten, dass die entwickelte Bibliothek von Delphi-Programmen aus nutzbar und auf dem Betriebsystem Windows NT 4 lauffähig sein musste.
Abgabe: 22.04.2002 Kolloqium: 25.06.2002
Betreuer: Prof. Dr.-Ing. Jochen Heinsohn, Dipl.-Ing (FH) Torsion Storrer (IVU Traffic Technologies AG)
Downloads: Diplomarbeit A1-Poster Vortrag

Abgabe: 22.04.2002 Kolloqium: 21.05.2002
Betreuer: Prof. Dr. habil. Manfred Günther, Dipl.-Inform Ingo Boersch
Downloads: Diplomarbeit A1-Poster Vortrag

Die IT-Struktur der PCK Raffinerie GmbH beruht auf einem umfangreichen Client/Server basiertem Netzwerk. Innerhalb dieses Netzwerkes werden, mit dem Strukturierungsmittel "Verzeichnisablage", Dokumente geordnet abgelegt und dem Nutzer über ein zentrales Menü zur Verfügung gestellt. Für die Verwaltung technischer Dokumente wird ein Dokumentenverwaltungssystem (DVS) im SAP/R3 eingesetzt.
Es ist der Einsatz von Dokumenten-Management-Systemen zu untersuchen, um so die bestehende properitäre Lösung für die Verwaltung der zentralen Dokumente mit allgemeinem Charakter zu ersetzen. Die Verwaltung und Nutzungsmöglichkeiten der Dokumente sollen damit wesentlich zu verbessert werden. Hierzu ist erstens der Ist-Zustand zu dokumentieren und ein Anforderungskatalog zu erstellen und zweitens eine praktische Untersuchung der Systeme durchzuführen.
Die Untersuchung soll auf wenige ausgewählte Systeme begrenzt werden. Von Seiten der PCK werden der Microsoft SharePoint Portal Server und das Dokumentenverwaltungssystem (DVS) des SAP/R3 Systems vorgegeben. Die Arbeitsweise und Funktionalität der ausgewählten Systeme ist in der Praxis, an Hand eines selbst gewählten Beispiels aufzuzeigen, nachzuweisen und zu vergleichen.
Das Ergebnis ist in Form einer Empfehlung für die PCK Raffinerie GmbH darzustellen.
Abgabe: 22.02.2002 Kolloqium: 27.03.2002
Betreuer: Prof. Dr.-Ing. Jochen Heinsohn, Dipl.-Ing. M. Thomas (PCK Schwedt)
Downloads: Diplomarbeit A1-Poster Vortrag

Zielstellung des Themas ist die Evaluation des Reinforcement-Lernens (speziell Q-Lernen) zur Anwendung in mobilen Systemen. Hierbei sollen die verschiedenen Arten der Methode theoretisch und experimentell verglichen und beispielhaft im Simulator sowie im realen Roboter umgesetzt werden. Die Anwendungsdomäne sei dabei das Erlernen eines Verhaltens zur Hindernisvermeidung mittels Sonarsensoren. Die Implementierung soll besonderen Wert auf die Wiedernutzbarkeit legen.
Abgabe: 10.01.2002 Kolloqium: 31.01.2002
Betreuer: Prof. Dr.-Ing. Jochen Heinsohn, Dipl.-Inform Ingo Boersch
Downloads: Diplomarbeit A1-Poster Vortrag
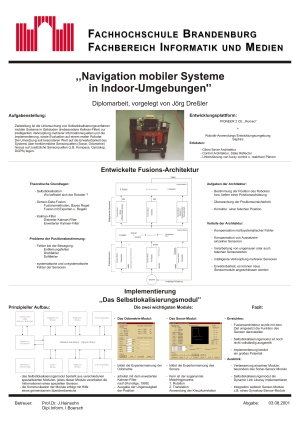
Zielstellung des Themas ist die Untersuchung von Selbstlokalisierungsverfahren mobiler Systeme in Gebäuden (insbesondere Kalman-Filter) zur intelligenten Verknüpfung mehrerer Informationsquellen und die Implementierung, sowie Evaluation auf einem realen Roboter. Die Umsetzung soll besonderen Wert auf die Erweiterbarkeit des Systems über die herkömmlichen Sensorquellen (Sonar, Odometrie) hinaus auf zusätzliche Sensorquellen (z.B. Kompass, Gyroskop, DGPS) legen.
Abgabe: 03.08.2001 Kolloqium: 27.09.2001
Betreuer: Prof. Dr.-Ing. Jochen Heinsohn, Dipl.-Inform Ingo Boersch
Downloads: Diplomarbeit A1-Poster

Zielstellung des Themas ist die Entwicklung einer vollständigen Demoapplikation mit einem realen Roboter für folgendes Szenario: Auf einem Teppichuntergrund liegt verstreut farbiges Spielzeug, daß durch einen Roboter eingesammelt und in einer Sammelstelle abgelegt werden soll. Die Objekte sollen mittels optischer Objekterkennung lokalisiert und gezielt aufgenommen werden. Für die Lösung der Aufgabe ist eine intelligente Verknüpfung von Bildverabeitung, Handlungsplanung und Navigationsleistungen notwendig. Besonderes Augenmerk ist auf die Robustheit und die "Gutmütigkeit" des Systems zu legen.
Abgabe: 15.01.2001 Kolloqium: 26.01.2001
Betreuer: Prof. Dr.-Ing. Jochen Heinsohn, Dipl.-Inform Ingo Boersch
Downloads: Diplomarbeit A1-Poster Vortrag