Robot Building Lab im WS16/17
Montag, Januar 23, 2017
Autonome Taxis, ...
... die smart auf Veränderungen der Verkehrswege reagieren, waren das Ziel im Bachelorprojekt im Gebiet der Künstlichen Intelligenz. Im sog. Robot Building Lab entwerfen, konstruieren und programmieren Studierende autonome Roboter, die sich selbständig in einer Welt - diesmal einer Stadt - zurechtfinden. Es gibt zwar zentrale Verkehrsmeldungen, aber keine zentrale Steuerung, Autonomie ist gefragt.
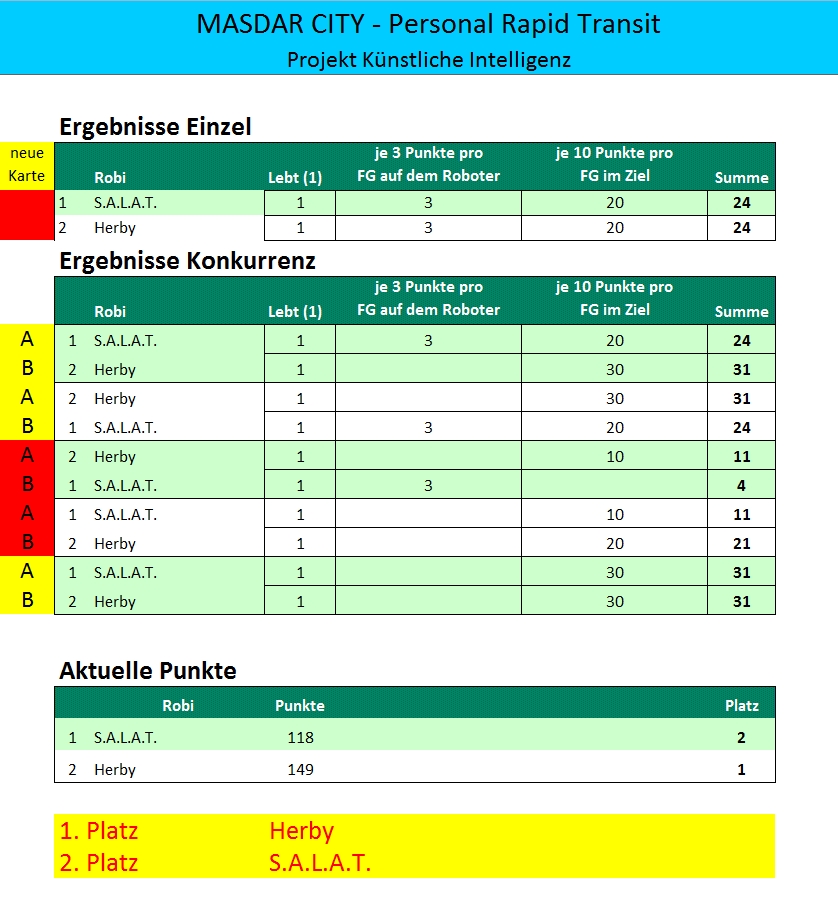
Die Stadt ist ein wenig formalisiert als ein Gitter aus schwarzen Linien, in dem bestimmte Kreuzungen als gesperrt markiert sind - ein Unfall. Die Systeme erhalten den aktuellen Stand der Sperrungen und planen selbständig einen Weg durch die Stadt zu den Passagieren - der optimale Weg ist hilfreich, wenn man den Wettstreit gewinnen möchte. Was ist optimal? Wie finde ich den Weg? Auf einem Mikrocontroller? Kann ich den Weg zuverlässig zurücklegen? Begegne ich anderen Systemen? Werde ich meine Fahrgäste vorfinden oder war die Konkurrenz schneller?Im Wettkampf traten 4 Systeme gegeneinander an, leider hatten zwei Startprobleme. Zwei Systeme liefen sehr robust, wie rechts die Punktetabelle zeigt.
Die Roboter werden in folgenden Projektarbeiten beschrieben.
-
Roboter
S.A.L.A.T.
"Trotz seiner Langsamkeit war er in der Lage bei allen Karten, außer Fahrplan Nr.7, mindestens zwei Fahrgäste abzuholen und zum Start zurückzubringen, wobei er den letzten Fahrgast immer schon im Greifer hatte. Als Wertung der Arbeit lässt sich sagen, dass S.A.L.A.T. sehr zuverlässig ist und dem Sieger des Wettbewerbes nur in Sachen Tempo etwas unterlegen war."
-
Roboter
Herby
"Den Roboter, den wir während des Projektes konstruiert haben, tauften wir auf den Namen „Herby“. Dieser stammt aus dem gleichnamigen Film „Herby – Ein kleiner Flitzer“. Wir hielten ihn für passend, da sich unser Roboter vom Beginn an am schnellsten fortbewegte."