MASDAR CITY - Personal Rapid Transit (Projekt Künstliche Intelligenz im WS12/13)
 PRT
- Personal Rapid Transit
PRT
- Personal Rapid Transit
Ein PRT-System ist eine Flotte kleiner Fahrzeuge, die jeweils eine oder
wenige Personen ohne Zwischenhalt zu individuellen Zielen
transportieren. Das derzeit größte geplante PRT-Netz mit 30.000
3000 Fahrzeugen entsteht in Masdar City, einer am Reißbrett entworfenen
Stadt in der Wüste der Vereinigten Arabischen Emirate. In Masdar City
sollen 50.000 Menschen CO2- und energieneutral leben und arbeiten.
Fahrzeuge mit Verbrennungsmotoren wird es dort nicht geben. Eine erste
Testinstallation eines PRT-Netzes der Firma 2getthere (Niederlande) mit
10 Fahrzeugen, zwei Personen- und drei Frachtstationen ist seit August
2011 in Masdar City in Betrieb.
Probleme im PRT-Netz entstehen bei Überlastung (globaler Stau) oder durch liegenbleibende Fahrzeuge. Der damit verbundene Verlust befahrbarer Strecken erfordert ein Neuplanen von Fahrtrouten. Und hier kommen Sie ins Spiel.
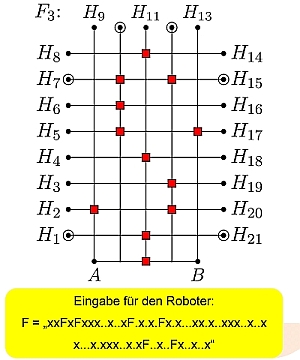
Aufgabe
Ihr Roboter erhält den Auftrag, eine oder mehrere Personen abzuholen und zum Ziel zu bringen. Das Streckennetz ist ein einfaches Gitter, in dem es allerdings zu Störungen und damit unbefahrbaren Kreuzungen kommen kann. Die gute Nachricht ist, das Sie über globales Wissen verfügen und die aktuelle Karte der befahrbaren Wege dem Roboter kurz vor dem Start zur Verfügung gestellt wird.
Es ist eine der schwierigsten Aufgaben der letzten Jahre in diesem Projekt, da zusätzlich zur Roboterkonstruktion und -programmierung auch die Breitensuche eines optimalen Pfades zwar nach Lehrbuch aber mit vielen Detailproblemen zu lösen ist. Diesmal existiert keine Minimallösung (eingängig, wiederholbar, einfach zu bauen [BHL98]) - entweder ALLE Komponenten erfüllen ihre Aufgabe oder das System scheitert. Der Umfang der zu lösenden Teilprobleme erfordert eine klare Arbeitsteilung im Projekt, 10 Studenten in vier Teams nahmen teil.
Folgende Roboter traten an, verlinkt sind die Projektberichte:
Fotos vom Wettbewerb:
