MASDAR CITY - Personal Rapid Transit (Projekt Künstliche Intelligenz im WS13/14)
Mittwoch, Februar 05, 2014
 Wir wiederholen das schwierige Projekt "Masdar City" des letzten
Jahres, in dem planende Roboter konstruiert und programmiert
werden. Einen reaktiven LEGO-Roboter zu bauen ist zwar spannend, aber
einen Roboter, der darüberhinaus zunächst einen optimalen
Plan erstellen muss, ist etwas anpruchsvoller. Es handelt sich 'nur'
um eine Planung in einer deterministischen Welt und auch die
Fahrtausführung rechnet nicht mit dynamischen Überraschungen - aber
dennoch muss ein passendes Suchverfahren mit wenig Speicher und
CPU-Leistung umgesetzt werden. Der damit gefundene optimale Fahrweg
ist aber noch kein Aktionsplan und erst noch in Handlungsanweisungen
zu übersetzen. Die einfacheren Probleme reichen von der Regelung zum
Linienfolgen, Getriebebau, Greiferkonstruktion bis zur Lokalisierung.
Wird nur eines der Probleme nicht gelöst, erhält man trotz harter Arbeit
einen nicht funktionierenden Roboter - Zeitplanung, Arbeitsteilung und
realisitische Einschätzung von Schwierigkeiten werden missionskritisch.
Wir wiederholen das schwierige Projekt "Masdar City" des letzten
Jahres, in dem planende Roboter konstruiert und programmiert
werden. Einen reaktiven LEGO-Roboter zu bauen ist zwar spannend, aber
einen Roboter, der darüberhinaus zunächst einen optimalen
Plan erstellen muss, ist etwas anpruchsvoller. Es handelt sich 'nur'
um eine Planung in einer deterministischen Welt und auch die
Fahrtausführung rechnet nicht mit dynamischen Überraschungen - aber
dennoch muss ein passendes Suchverfahren mit wenig Speicher und
CPU-Leistung umgesetzt werden. Der damit gefundene optimale Fahrweg
ist aber noch kein Aktionsplan und erst noch in Handlungsanweisungen
zu übersetzen. Die einfacheren Probleme reichen von der Regelung zum
Linienfolgen, Getriebebau, Greiferkonstruktion bis zur Lokalisierung.
Wird nur eines der Probleme nicht gelöst, erhält man trotz harter Arbeit
einen nicht funktionierenden Roboter - Zeitplanung, Arbeitsteilung und
realisitische Einschätzung von Schwierigkeiten werden missionskritisch.
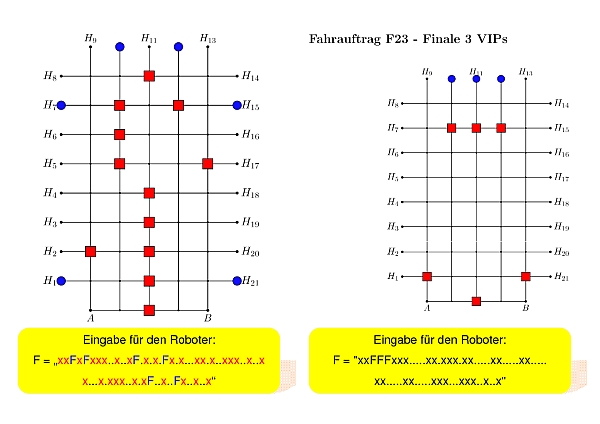
Es folgen die Aufgabe und zwei Fahraufträge. Der zweite Fahrauftrag F23
ist im Finale von den beiden besten Robotern zu fahren und hat die
Besonderheit, dass ein Passagier mit dem minimalen Weg von 15 zu holen
ist, aber für diesen Weg 60 gleich lange Alternativen existieren - die
Agenda einer normalen Breitensuche erzeugt damit eventuell ein
Speicherproblem. Eine zweite Besonderheit ist die Erreichbarkeit aller
Fahrgäste durch beide Roboter.

Folgende Roboter traten an, verlinkt sind die Projektberichte:
- Bug,
- The Shame,
- Spacepolice,
- Jacob, die Zicke und
- der Bussomat.
Die Systeme zeigten hervorragende Leistungen im Wettbewerb am
16.01.2014, fast alle funktionierten komplett. Im Finale wurde die
zuverlässige Spacepolice knapp vom etwas schnelleren Bussomat
überholt. Unten die bis zum Wettbewerb unbekannten Fahraufträge, die
Punkteliste und Fotos vom Wettbewerb:


Perspektiven von PRTs
Mittelfristig (im nächsten Jahrzehnt) werden erste PRT-Installationen in
Städten im Nahverkehr auftauchen, bspw. wenn Strassenbahnen ersetzt
werden oder in Fussgängerzonen. Die Firma Ultra
Global PRT, die das System in Heathrow betreut, plant die
Schnittstellen der Pods zur Fahrstrecke und zum Zentralrechner zu
standardisieren und freizugeben, um auf diese Weise einen Wettbewerb von
Pod-Herstellern zu starten. Angeboten wird auch einen Simulator,
mit dem die ungefähre Anzahl an Pods für die eigene Installation
bestimmt werden kann. Das Heathrow-PRT besteht aus 4 km Strecke, 21 Pods
und bewegt ca. 1500 Gruppen am Tag.
In Deutschland ist uns keine Installation im öffentlichen Raum bekannt,
es sei denn man zählt die fahrerlose
U-Bahn in Nürnberg dazu. Aber es gibt sicher einige Systeme in
Vergnügungsparks oder Gartenschauen.
Euroaweit tut sich eine Menge, bspw. das CityMobile2-EU-Projekt
in einigen Städten. Eine bekannte europäische Firma ist
2getthere aus Holland, die das System in MASDAR-City baut. Eine weitere
Firma (Frankreich) ist ROBOSOFT, die im Fort
of Simserhof in Bitche (France) ein Transportsystem für Touristen
installiert hat.
PRTs werden sich ihre Berechtigung bei hohem Passagier-Durchsatz, in
abgeschlossenen Gebieten oder bei Kurzstrecken erarbeiten. Wenn Sie
weitere Beispiele in Deutschland finden, wäre das auch für uns
interessant, Mail siehe Kontakt.