Masterarbeit von Colin Christ
Real-time reinforcement learning von Handlungsstrategien für humanoide Roboter
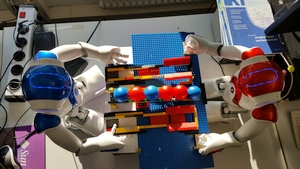
Ziel der Arbeit ist die Entwicklung einer Applikation zur Demonstration von Reinforcement- Lernen (RL) auf autonomen, humanoiden Robotern. Demonstriert werden soll das Erlernen einer erfolg- reichen Handlungsstrategie in einem einfachen realen Szenario. Das Szenario kann selbst gewählt werden, bspw. das Sortieren von Bällen. Das Szenario soll im Wesentlichen deterministisch, kann aber in seltenen Fällen stochastisch reagieren. Der Lernvorgang soll unbeaufsichtigt selbständig laufen können und in kurzer Zeit (bspw. einer Stunde) zu einer erfolgreichen Policy führen.
Ein zweiter Applikationsmodus soll das unbegrenzte Ausführen der erlernten Policy ermöglichen. Für den Lernvorgang darf der Agent keine fremderstellte Simulation verwenden, für Evaluierung und Test der Applikation ist eine Simulation natürlich erlaubt. Damit besteht die zweite Schwierigkeit in der geringen Anzahl von Interaktionen mit dem realen Szenario, so dass Maßnahmen zur Effizienzsteigerung klassischer RL-Ansätze verwendet werden müssen. Hilfreich wäre eine geeignete Visualisierung des Lernvorganges bzw. der Policy oder transparenter Wertefunktionen, um Besuchern und Studenten den Ablauf zu verdeutlichen und die Programm-Entwicklung zu unterstützen.

Kolloqium: 07.03.2018
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr. Jochen Heinsohn
Download: A1-Poster, Kolloquiumsvortrag, Masterarbeit