AKSEN - Controller für reaktive Roboter
Montag, August 16, 2004
Download Flyer: ![]()
![]()
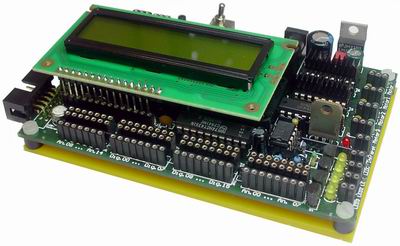
Das AKSEN-Board wurde 2003 im Bereich 'Technische Informatik' im Fachbereich Informatik und Medien an der FH Brandenburg entwickelt und befindet sich seitdem in der Anwendung in Robot Building Labs an verschiedenen Fachhochschulen (u.a. Hannover, Brandenburg, Hamburg, Dortmund ... ) und Universitäten.
Das AKSEN-Board realisiert 2 Anwendungsfälle:
- als eigenständiger Controller für reaktive Robots (ähnlich 6.270, RCX, NXT, Arduino, C-Control etc.)
- als Aktor- und Sensorserver in einem RCUBE - System
Das AKSEN-Board tritt in unserem Labor die Nachfolge des 6.270-Boards an. Durch die langjährige Erfahrung mit verschiedenen Controllern für reaktive Roboter wurden von uns folgende Anforderungen definiert.
Besondere Eigenschaften
|
Peripherie
|
Sie wollen mehr wissen ...
- Handbuch (1.5 MB, PDF)
- Aktuelles CD-Release: AKSEN-CD Version 1.04 mit AKSEN-Lib 00.965, Flasher 1.4/0.3, Handbuch 1.04 (45 MB, zipped, 07.02.2005)
- 20.12.2006 - Bugfix des Empfanges von moduliertem Infrarot und Umstieg auf sdcc 2.6.0 in der AKSEN-Lib 0.970: Migrationsanleitung auf Aksenlib 0970.pdf, EXPORT-0970.zip, sdcc
- 11.05.07 - USB-RS232-Adapter: Bricht der Flashvorgang über einen derartigen Adpater ab, so versuchen Sie einen der beiden verzögerten Flasher (Windows) aus dem ZIP-File USB-RS232-flasher.zip
- 08.12.2008 - Bugfix beim mehrmaligen Selbstbeenden eines Prozesses AKSEN-Lib 0.971: EXPORT-0971.zip (Migration wie bei 0.970)
- Bauanleitung zum Selberlöten des AKSEN (PSD muss von der FH Brandenburg programmiert werden)
Ausprobieren
- im KI-Labor jederzeit nach Absprache
- Informationen zu Zubehör, kostenlosen Teststellungen bei Ingo Boersch