Autonome Intelligente Roboter WS25/26
 Manöverbeispiel der autonomen Schubkarre anhand einer Z-Marke
Manöverbeispiel der autonomen Schubkarre anhand einer Z-Marke
Autonome Intelligente Roboter – KI-Projekt im Wintersemester 2025/26
Im Projekt Autonome Intelligente Roboter entwickeln Studierende in kleinen Teams kreative Robotik- und KI-Anwendungen. Ziel ist die Realisierung autonom handelnder Demonstratoren, die intelligente Funktionen wie Wahrnehmung, Sprachverarbeitung, Planung, Lernen oder Interaktion mit Menschen kombinieren.
Projektübersicht
Das Smart Dungeons and Dragons Dice System erkennt Dungeons-&-Dragons-Würfel mit selbsttrainierten KI-Modellen und reagiert auf Wurfergebnisse mit Licht, Sound, Text und Bildern. Eine HTML-Anwendung, YOLOv8-Modelle und ein ESP32 mit WLED-Streifen bilden zusammen einen interaktiven Demonstrator. (Hannah Mierzchala)
Starseeker ist ein sprachgesteuerter Sternenzeiger. Sprachbefehle werden mit Whisper erkannt und mit einem LLM ausgewertet; anschließend richtet ein Arduino-gesteuerter Roboter einen Laserpointer auf den gewünschten Himmelskörper aus. (Fasih Uddin, Dilara Ihwe, Johanna Tille)
Der Autonome Aufräumroboter mit Turtlebot erkennt Objekte, die ein Staubsaugroboter potenziell aufsaugen könnte, und positioniert sich selbstständig davor. Dafür werden ein TurtleBot3 Waffle Pi, eine Onboard-Kamera, der OpenManipulator-X und ein selbsttrainiertes YOLOv8-Modell zur Objekterkennung eingesetzt. Ziel ist es, erkannte Objekte autonom anzufahren, zu greifen und auf dem Roboter zu transportieren, sodass der Boden für den Einsatz eines Staubsaugroboters freigeräumt wird. Das System konnte Objekte zuverlässig erkennen, verfolgen und sich mittig davor ausrichten.(Maike Maehs, Guillia F. Jiokeng Noutcha)
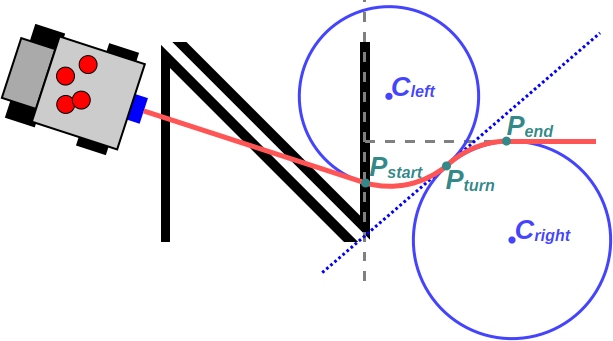
Z.E.D. – Die Autonom Fahrende Schubkarre ist ein Transportroboter, der einen durch künstliche Landmarken markierten Weg autonom abfährt. Optische Sensoren erkennen die Landmarks, eine IMU unterstützt die Kursstabilisierung, und ein ESP32-Dualcore-Mikrocontroller trennt Sensorverarbeitung und Aktionsplanung. Ziel ist ein nützlicher Demonstrator für Transportaufgaben, etwa in Gartenarbeit oder auf Baustellen. (Johann Gräfenhain, Titus Florin)
Der Fischreiherschreck demonstriert ein KI-gestütztes Vergrämungssystem. Eine Kamera am NVIDIA AGX Orin erfasst die Umgebung, während ein auf den COCO-Klassen trainiertes Objekterkennungsnetzwerk interessante Objekte wie Menschen oder Vögel erkennt und verfolgt. Die Zielposition wird über ein ELFIN-Funkmodul per WLAN an ein AKSEN-Board auf einem LEGO-Roboter übertragen. Beim Tracking richtet sich der Roboter auf das Ziel aus und verschießt einen Tischtennisball. (Luke Bartel)
Die Projektposter




Projektvideos
Betreuer: Prof. Dr. Emanuel Kitzelmann, Dipl.-Inform. Ingo Boersch