Willkommen im KI-Labor
Lehre und Forschung auf den Gebieten
-
Wissensverarbeitung und Methoden der Künstlichen Intelligenz:
Neuronale
Netze, Bayessche Netze, Ontologien und Wissensgraphen, Evolutionäre
Algorithmen, Induktive Logische Programmierung
-
Data Science, Maschinelles Lernen, Deep Learning
-
Intelligente Roboter
AI Prototyping Lab mit Projekten zu
-
Deep Learning, Large Language Models und Wissensgraphen
-
EDGE AI und Computer Vision
-
KI-Planung und Wissensverarbeitung
-
Intelligente Roboter
Studienrichtung
"Künstliche Intelligenz" im Informatikstudium
Vergleich von Methoden zur Echtzeit-Hinderniserkennung in
Forward-Looking-Sonardaten für die Kollisionsvermeidung
Kameras sind unter Wasser nur eingeschränkt für die
Hinderniserkennung einsetzbar. Die Bachelorarbeit erkundet daher
die Verwendung eines Forward-Looking-Sonars (FLS) auf dem „
Sonobot-5“ der Firma EvoLogics. Verglichen werden zwei klassische,
ein probabilistischer und ein Deep-Learning-basierter Ansatz mit
dem Ziel, eine echtzeitfähige Hinderniserkennung zur
Kollisionsvermeidung zu ermöglichen.
Forward-Looking Sonar (FLS): Ein FLS sendet Schallimpulse
kegelförmig nach vorne aus; reflektierte Echos werden empfangen
und als zweidimensionale Abbildung der Umgebung (Strahlenwinkel,
Entfernung) dargestellt.
mehr lesen ...
Mittwoch, Oktober 01, 2025
Neue Professorin für Künstliche Intelligenz am Fachbereich
Informatik und Medien der TH Brandenburg
Der Fachbereich Informatik und Medien der Technischen Hochschule
Brandenburg freut sich, Frau Prof. Dr.-Ing. Darya Kastsian
zum 1. September als neue Professorin für Künstliche
Intelligenz begrüßen zu dürfen.
Frau Prof. Kastsian bringt langjährige Erfahrung aus Forschung
und Entwicklung mit. Unter anderem war sie seit 2015 in
verschiedenen Funktionen bei der Siemens AG in Berlin tätig und
entwickelte dabei Lösungen in Simulation, Künstlicher Intelligenz
und Optimierung für den 3D-Druck.
Mit ihrer Berufung startet am Fachbereich die neue
Vertiefungsrichtung...
mehr lesen ...
Dienstag, September 09, 2025
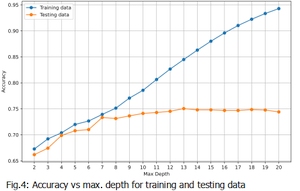
Interpretable Machine Learning in Procurement: Analysis and
Modeling of Sourcing Decisions using Decision Trees
Diese Bachelorarbeit im industriellen Kontext (Robert Bosch
GmbH) untersucht, wie sich Sourcing Decisions (SD) mittels
interpretierbarer Modelle automatisieren lassen – mit
Möglichkeit zur menschlichen Intervention. Zum Einsatz kommen
klassifikationsbasierte Entscheidungsbäume (Decision Trees, DT),
deren Struktur und Vorhersagen nachvollziehbar bleiben sollen.
Vorgehen: Entsprechend des Data-Science-Workflows werden
Rohdaten analysiert, bereinigt und aufbereitet (u. a. Umgang mit
fehlenden/fehlerhaften Werten). Aus bestehenden Merkmalen werden
neue Features abgeleitet, kategoriale Merkmale numerisch kodiert
und numerische Merkmale in den Bereich −1 bis 1 skaliert. Das
Zielmerkmal wird...
mehr lesen ...
Präsentation auf der ACL 2025 SRW: Robin Wagner
Robin Wagner, Masterstudent im Fachbereich Informatik und
Medien an der THB, präsentierte im Juli 2025 ein Poster und
long Paper auf dem Student Research Workshop der ACL 2025 in Wien. Sein Beitrag
ist eine systematische Literaturübersicht zu Methoden, die
sogenannte Halluzinationen in Antworten großer Sprachmodelle
(LLMs) durch die Integration von Wissensgraphen während des
Inferenzprozesses reduzieren.
Während einer intensiven 90-minütigen Postersession...
mehr lesen ...
Lange Nacht der Wirtschaft 2025
Bei der 6. Langen Nacht der Wirtschaft in der
Kleeblattregion präsentierte sich das KI-Labor der
Technischen Hochschule Brandenburg mit einem eigenen Stand im
KMG-Klinikum in Kyritz. Vor Ort waren Professor Dr. Emanuel
Kitzelmann sowie die Masterstudierenden Albert Zacher
und Max Tepper, die Einblicke in ihr aktuelles Projekt zur
Verbindung von KI und Robotik gaben.
Im Mittelpunkt stand der vierbeinige Roboter Unitree Go2
EDU, der mit dem Open-Source-Framework ROS 2 für
autonome Navigation und Interaktion ausgestattet wurde. Die
Besucherinnen und Besucher...
mehr lesen ...
Instanzsegmentierung auf Edge AI-Plattformen: Integration von
Basler Hochgeschwindigkeitskameras und YOLO-Seg
In seiner Bachelorarbeit entwickelte Lasse Broer ein
performantes KI-System zur Instanzsegmentierung auf einem Jetson
AGX Orin, das Bilddaten einer Basler
Hochgeschwindigkeitskamera in Echtzeit mit einem
YOLO-Seg-Modell verarbeitet.
Im Mittelpunkt der Arbeit stand die vollständige Installation
und Konfiguration aller Komponenten sowie die Evaluation der
Bildverarbeitungspipeline hinsichtlich Genauigkeit,
Geschwindigkeit und Latenz. Zur Veranschaulichung entstand ein
Demonstrator auf Basis von NVIDIA DeepStream, der auf einer
Rampe zwei Objekte bei bis zu 198 Hz analysiert.
Das entwickelte Testframework erlaubte die gezielte
Variation zentraler Parameter (Präzision,...
mehr lesen ...
Mittwoch, Februar 26, 2025
Umgebung vor
Start
Masterprojekt von Arne Allwardt: Autonomer Lagerroboter mit
ROS2 und Manipulator
Im Rahmen seines Masterprojekts im WS24/25 entwickelte Arne
Allwardt einen autonomen mobilen Roboter auf Basis des
TurtleBot3 mit einem OpenManipulator-X-Arm. Ziel des
Projekts war es, einen Prototypen zu realisieren, der selbstständig
bestimmte Objekte an definierten Lagerplätzen aufsucht,
greift und zurückbringt.
Der Roboter kartiert mit Hilfe der SLAM Toolbox seine
Umgebung, lokalisiert sich über AMCL (Adaptive Monte Carlo
Localization) und steuert mit Nav2 gezielt Positionen an, an
denen blaue...
mehr lesen ...
KI-Labor begrüßt Laufroboter NOVA
Das KI-Labor der Technischen Hochschule Brandenburg hat mit NOVA
einen neuen Laufroboter in Betrieb genommen. Bei NOVA handelt es
sich um ein Modell vom Typ Go2 EDU Plus des Herstellers
Unitree, ausgestattet mit modernster Sensorik wie LIDAR, der
Middleware ROS 2 und frei programmierbar in Python.
NOVA kann Treppen steigen und unwegsames Gelände
meistern. Er erreicht eine Geschwindigkeit von bis zu
3,7 m/s und trägt Lasten bis 8 kg. Der
Roboter kann sowohl ferngesteuert als auch autonom
agieren und wird im Masterprojekt im Sommersemster
2025...
mehr lesen ...
Mittwoch, Januar 15, 2025
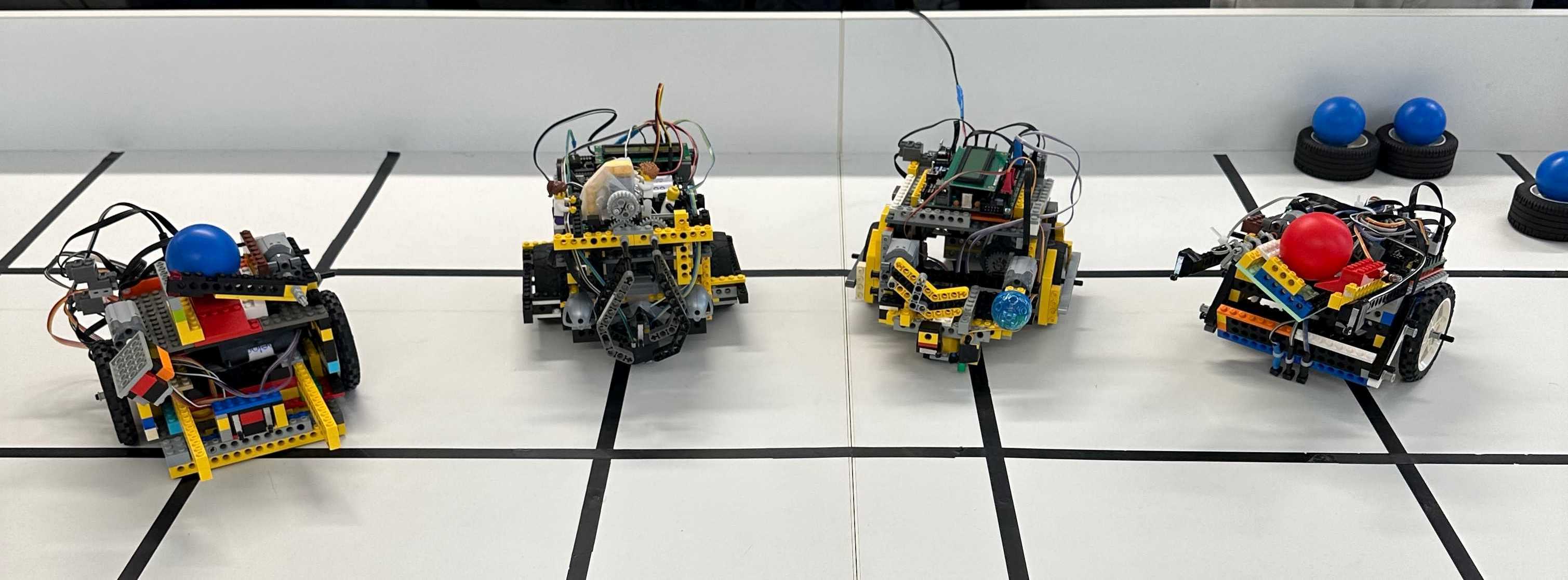
Autonome Intelligente Roboter – KI-Projekt im Wintersemester
2024/25
Im Projekt Künstliche Intelligenz des Wintersemesters
2024/25 entwickelten Studierende in 2- bis 3-köpfigen Teams
kreative Robotiklösungen, bei denen autonome und intelligente
Handlungen im Vordergrund standen. Ziel war es, Demonstratoren zu
realisieren, die nicht nur technisch funktionieren, sondern auch
einen Showcase-Charakter haben.
3 Anforderungen
- Autonom intelligent handeln
- Nützlich (perspektivisch)
- Showcase, Demonstrator
Ausgangspunkt war eine Auswahl verschiedener Robotersysteme:
Turtlebots, NAOs, AKSEN-Boards,
OpenManipulator-X und das leistungsstarke NVIDIA AGX
Orin. Nach einer dreiwöchigen Konzeptionsphase mit
intensiven Technik-Demos, individueller...
mehr lesen ...
Mittwoch, November 27, 2024
ZF Brandenburg: Datenanalyse mit KNIME
An zwei Workshoptagen, dem 06.11. und 27.11.2024, nahmen neun
Mitarbeitende der ZF Getriebe Brandenburg GmbH an einer
Weiterbildung zur Daten-Analyse und -Modellierung mit KNIME
an der Technischen Hochschule Brandenburg teil.
In vier aufeinander aufbauenden Modulen wurden zentrale
Kompetenzen zur datenbasierten Entscheidungsunterstützung
vermittelt. Modul 1 bot einen Überblick über die KNIME-Oberfläche,
Workflows und Best Practices. In Modul 2 stand ein konkreter
Anwendungsfall aus dem Vertrieb im Zentrum, bei dem es um die
Automatisierung datengetriebener Berichte ging.
Modul 3 widmete sich der Modellierung und Evaluation: Themen
wie...
mehr lesen ...
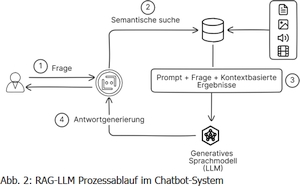
Automatisierung des Kundensupports in Softwareunternehmen durch
den Einsatz von Large Language Models (LLMs) und
Retrieval-Augmented Generation (RAG)
Die Masterarbeit entwickelt und evaluiert ein RAG-System
(Retrieval-Augmented Generation) zur teilweisen Automatisierung des
Kundensupports für ein Praxisverwaltungssystem (PVS) in
einem realen Unternehmen.
Die Arbeit stellt die theoretischen Grundlagen von RAG vor und
nutzt diese in der Konzeptionsphase zur Variantendiskussion. Die
besondere Herausforderung liegt in der Komplexität der eingesetzten
Technologien und der Einbettung des Systems in den realen
Anwendungskontext des Unternehmens.
Die praktische Umsetzung erfolgt durch die Entwicklung eines
Chatbots mit einer...
mehr lesen ...
FBI unterstützt ZF Brandenburg mit KI-Workshop
Ingenieure und Informatiker der „ZF Getriebe Brandenburg GmbH“
nahmen am 24.04.24 und 15.05.24 an einem Workshop im
Informatikzentrum der Technischen Hochschule Brandenburg teil, bei
dem sie sich gemeinsam mit Prof. Dr. Georg Merz, Prof. Dr. Emanuel
Kitzelmann und Ingo Boersch intensiv dem Thema „Künstliche
Intelligenz“ widmeten. Ziel der Veranstaltung war es, durch die
Diskussion praktischer Anwendungsfälle, die Klärung
zentraler Begriffe und praktische Hands-on-Erfahrungen ein
fundiertes Verständnis von KI und Data Science zu fördern.
In...
mehr lesen ...
THB zu Gast beim Netzwerk "Roboter im Bildungskontext"
Am 01.03.2024 nahmen Prof. Kitzelmann, Prof. Pohl und Ingo
Boersch für die Technische Hochschule Brandenburg am
Netzwerktreffen "Roboter im Bildungskontext" an der TU
Berlin teil. Ziel des Treffens war es, den Austausch über den
Einsatz von Robotiksystemen als Lehrmittel zu fördern – etwa
zur Vermittlung von KI-Methoden in Studium und Schule.
Die THB setzt Roboter bereits aktiv in der Lehre ein, unter
anderem zur Vermittlung praxisnaher Kompetenzen im Bereich
Künstliche Intelligenz. Das Netzwerk bietet dafür eine
wertvolle Plattform, um Ideen, Projekte und didaktische
Konzepte...
mehr lesen ...
Donnerstag, Februar 08, 2024
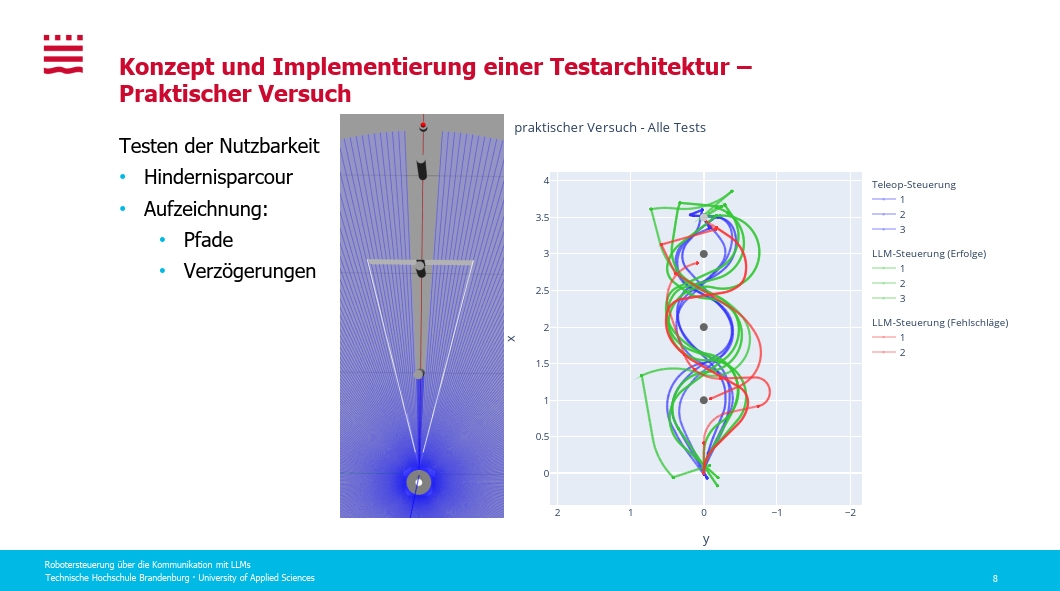
GPT als Schnittstelle zwischen Menschen und Robotern am
Beispiel eines rudimentären Bringe-Roboters im Szenario der
Pflege
Im Rahmen des Masterprojektes "Künstliche Intelligenz - ChatGPT
in Action" im WS23/24 wurde ein Prototyp einer Robotersteuerung
entwickelt. Ziel des Projektes ist die Entwicklung und Evaluierung
eines Systems zur Steuerung eines Pflegeroboters durch
Kommunikation mit einem Large Language Model (LLM) am Beispiel
eines rudimentären Bringeroboters. Es geht um die Untersuchung
der Eignung des LLM als Schnittstelle zwischen einem Roboter und
einer körperlich eingeschränkten Person, um einfache Aufgaben in
der Sichtweite und unter Kontrolle des Nutzers zu übernehmen.
...
mehr lesen ...
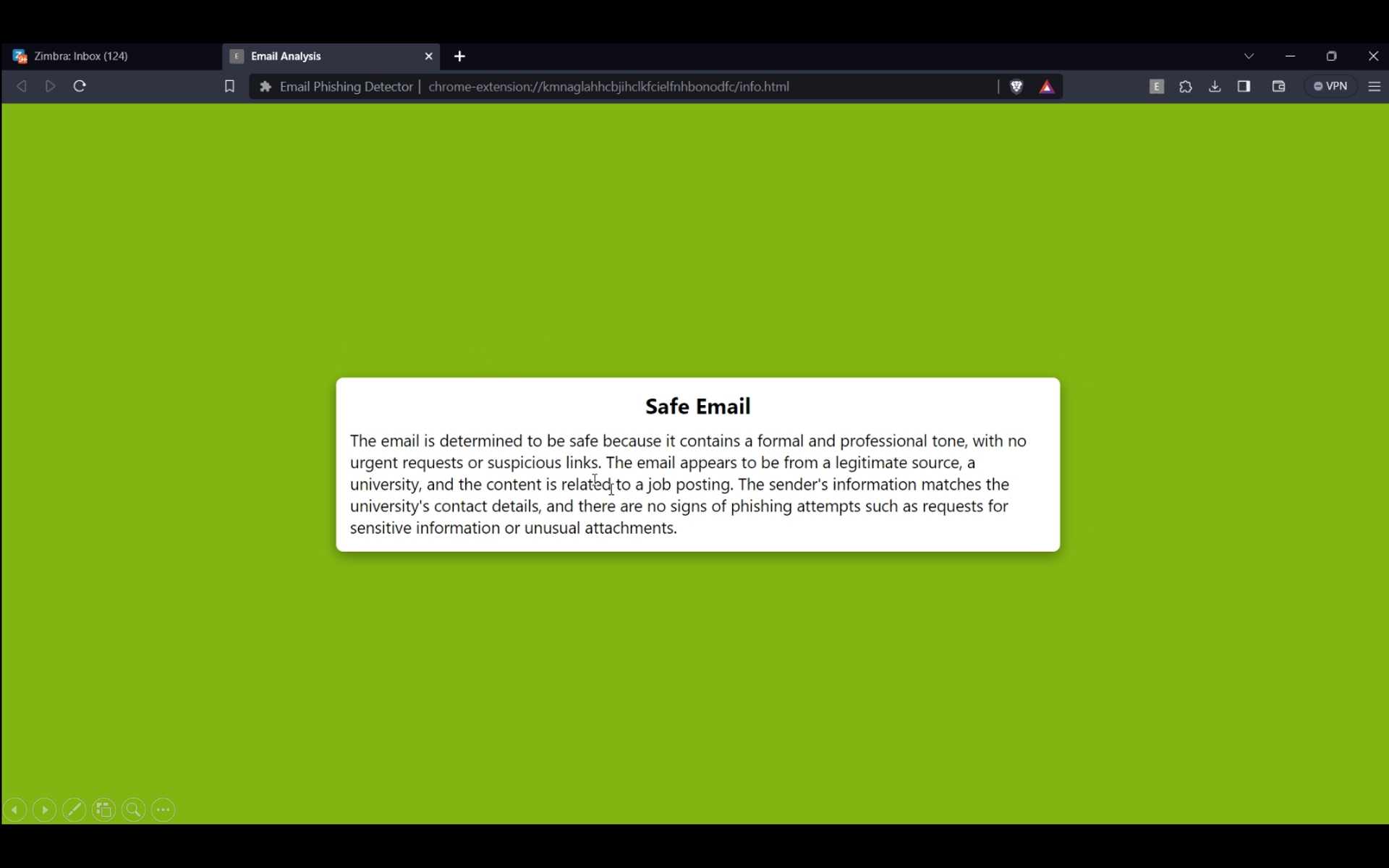
LLMs zur Detektion von Phishing-Emails
Im Rahmen des Masterprojekts "Künstliche Intelligenz - ChatGPT
in AKtion" im WS23/24 wurde von drei Erasmus-Studierenden ein
Prototyp für einen Email-Checker entwickelt, der mit Hilfe
eines Sprachmodells eine Email in Zimbra mit einem Chrome-Plugin
auf Anzeichen von Phishing überprüft
Das Prinzip besteht darin, dass der Emailtext mit einem
speziell entwickelten Prompt, der teilweise durch einen genetischen
Algorithmus optimiert wurde, mit GPT-3.5 klassifiziert wird.
Dabei berücksichtigt GPT bestimmte psychologische Aspekte [SMG22]
und kann bei Bedarf auch erklären, warum die Email
als...
mehr lesen ...
Mittwoch, Januar 17, 2024
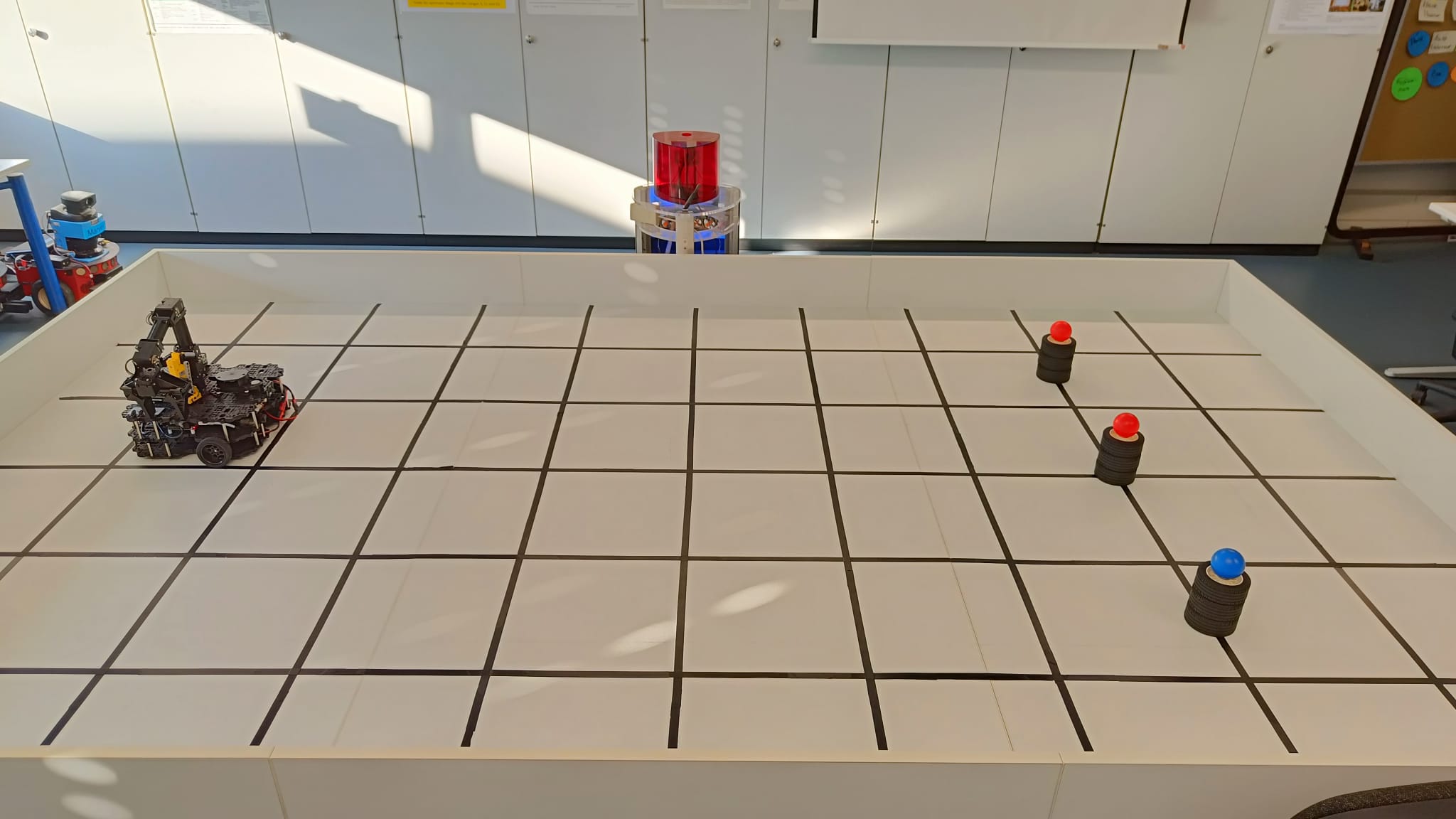
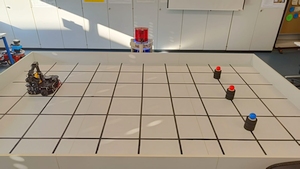
Pizzabote 2024 - Breitensuche praktisch
In diesem Bachelorprojekt geht es um die Konstruktion und
Programmierung eines Roboters, der Pizzas einzeln an Kunden
ausliefert. Die Welt ist formalisiert, nicht wirklich essbar und
dennoch real und physisch:
"Ihr Roboter erhält den Auftrag, eine oder mehrere Pizzen
auszuliefern. Das Streckennetz ist ein einfaches Gitter, in dem es
jedoch zu Störungen und damit zu unpassierbaren Kreuzungen kommen
kann. Die gute Nachricht ist, dass Sie über globales Wissen
verfügen und die aktuelle Karte der befahrbaren Wege dem Roboter
kurz vor dem Start zur Verfügung...
mehr lesen ...
Mittwoch, Oktober 04, 2023
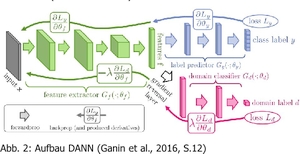
Domain-Adversarial Training neuronaler Netze zur Überbrückung
von Domänenlücken und Vergleich mit Contrastive Learning in einer
industriellen Anwendung
Die Arbeit im realen industriellen Kontext konzentriert sich auf
die Implementierung des Domain-Adversarial Trainings neuronaler
Netze (DANN) zur Überbrückung einer Domänenlücke zwischen
verschiedenen Kameratypen, speziell Industriekameras und
Smartphone-Kameras. Ziel der Arbeit ist es, ein Regressionsmodell
zu trainieren und dieses gegen einen anderen Ansatz zu evaluieren,
der Contrastive Learning for Unpaired Image-to-Image Translation
(CUT) verwendet.
Die Trainingsdaten bestehen aus vorverarbeiteten Bildern von
Laserschnittkanten. Um die Untersuchungen möglichst praxisnah zu
gestalten, wird die Anzahl der verwendeten gelabelten...
mehr lesen ...
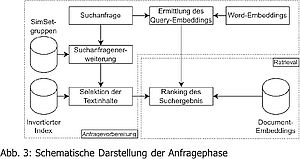
Evaluation eines Word-Embedding-basierten
Information-Retrieval-Systems
Die Arbeit konzentriert sich auf die Evaluation eines
Word-Embedding-basierten Information-Retrieval-Systems, das von der
Fraunhofer-Gesellschaft zum Patent angemeldet wurde. Ein besonderes
Merkmal des IR-Systems ist die Verwendung von "SimSets" als
zentrale Datenstruktur, die dazu dient, die Zeit für die Ermittlung
der Suchergebnisse zu minimieren. Die Arbeit vergleicht dieses
System mit einer Volltextsuche und einer durch einen
domänenspezifischen Thesaurus erweiterten Volltextsuche, um deren
Effektivität zu bewerten.
In der Arbeit werden drei verschiedene Evaluationsmethoden
vorgestellt: Online-Evaluation, Interactive-Evaluation und die
Testdatensatz-basierte Evaluation, die dann für die Untersuchung
verwendet wird.
Die...
mehr lesen ...
Donnerstag, März 30, 2023
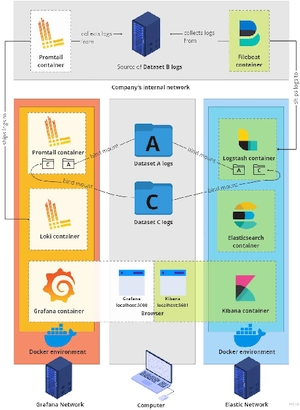
A Comparison of the Elastic Stack and Grafana Stack as Tools
for Analysing Log Data
Diese Arbeit analysiert zwei Gruppen von Open-Source-Software
für Log-Management und Log-Analyse: den Elastic Stack und den
Grafana Stack. Jeder Stack besteht aus einem Log-Aggregator, einer
Suchmaschine, die auch als Datenspeicher dient, und einer
Browser-Schnittstelle. Das Ziel der Arbeit ist der Vergleich der
beiden Log-Management-Stacks in einer ressourcenbeschränkten
Umgebung. Hierbei sollen typische Anwendungsdaten ausgewählt und
die Stacks beim Einlesen und Abfragen bezüglich der
Ressourcennutzung und Abfrageleistung evaluiert werden. Zusätzlich
soll ein Überblick über die Funktionalität der Stacks hinsichtlich
der geplanten...
mehr lesen ...
Generieren von Navigationsnetzwerken für GeoJSON Innenraum
Karten zur Optimierung der ServiceNow Indoor-Mapping
Applikation
Diese Arbeit befasst sich mit dem Entwurf und der
Implementierung eines Algorithmus zur Erzeugung von
Indoor-Navigationsnetzwerken aus Gebäudekarten. Die Netze sind
Straßenkarten und sollen zur Navigation von Fußgängern im Gebäude
dienen. Dazu sind die Anforderungen zu definieren, die
theoretischen Grundlagen der algorithmischen Geometrie
darzustellen, Algorithmen auszuwählen und zu evaluieren.
Der ausgewählte Algorithmus soll in der Anwendung des
Unternehmens implementiert und evaluiert werden. Die besonderen
Schwierigkeiten ergeben sich aus der Integration in eine reale
Anwendung und der Einarbeitung in ein...
mehr lesen ...