Masterarbeit von Vanessa Vogel
Human-Robot-Interaction zum überwachten Lernen einer Objekterkennung durch den humanoiden Roboter NAO
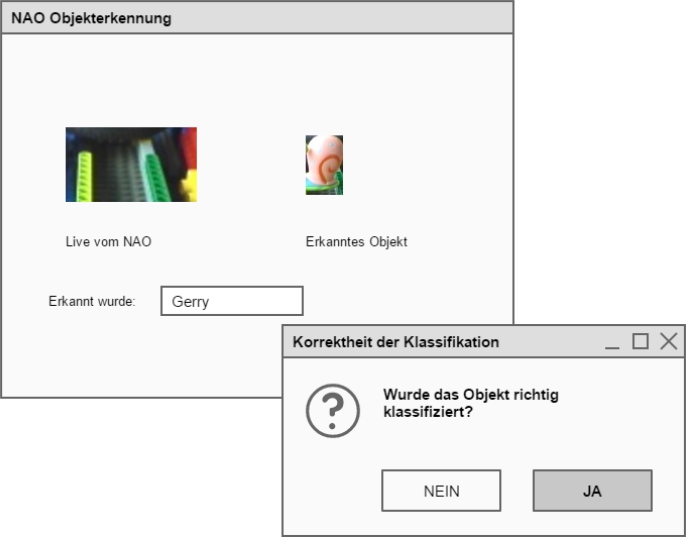
Ziel der Arbeit ist die Entwicklung einer Applikation zur Demonstration der Interaktion einer Person mit einem Roboter zum Erlernen von Objekten, die später wiedererkannt werden sollen. Der Schwerpunkt liegt zum einen auf der Entwicklung des Interaktionsmodells und zum anderen auf einer zuverlässigen Erkennung nach wenigen Lernbeispielen. Die besondere Schwierigkeit liegt in der Verwendung des NAO-Roboters. Die Arbeit soll die Vorarbeiten berücksichtigen und diese weiterentwickeln.
Im Ergebnis entstand eine Python-Applikation, die im Dialog mit einem Menschen in der Lage ist, Objekte zu labeln und wiederzuerkennen. Eine kreative Lösung stellt die robuste Eingabe des Labels über Stempel und Zeichenerkennung dar. Das Wiedererkennen wird durch Segemntierung und Klassifikation gelöst. Die Segmentierung erfolgt pragmatisch anhand eines initialen Hintergrundes, für die Klassifikation werden SIFT-Features als Objektmerkmale extrahiert und damit eine RBF-SVM trainiert.

Kolloqium: 07.03.2018
Betreuer: Dipl.-Inform. Ingo Boersch, Prof. Dr. Jochen Heinsohn
Download: A1-Poster